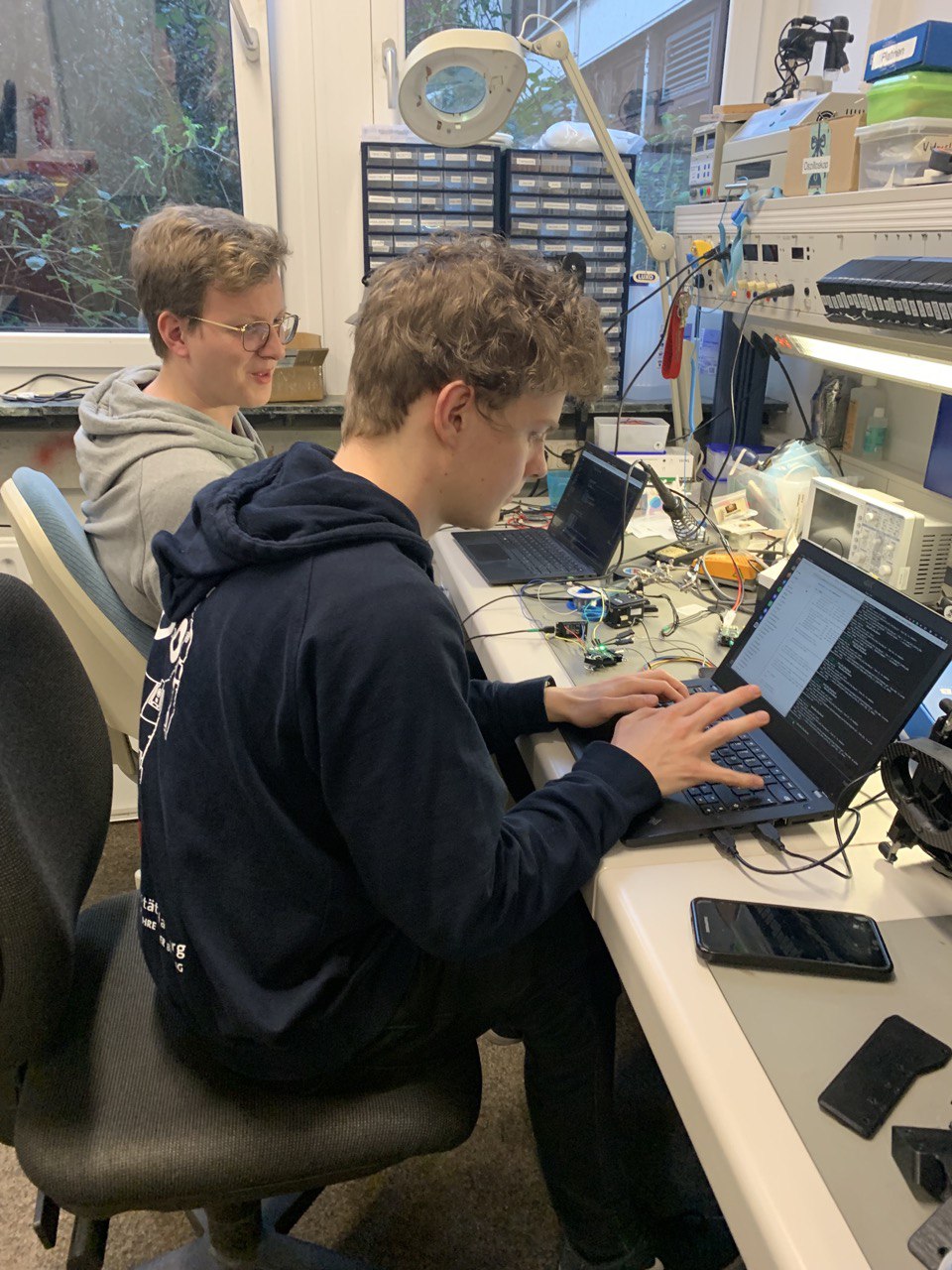
From Friday, March 15th to March 22nd, 2024, we had our Integration Week. The goal of this week was to have as many members as possible in the lab during this time and to see how the individual components of a robot interact with each other. This year, we aimed to improve our walking and work on our hardware. With some snacks, we met in the lab for eight days and accomplished a lot together.

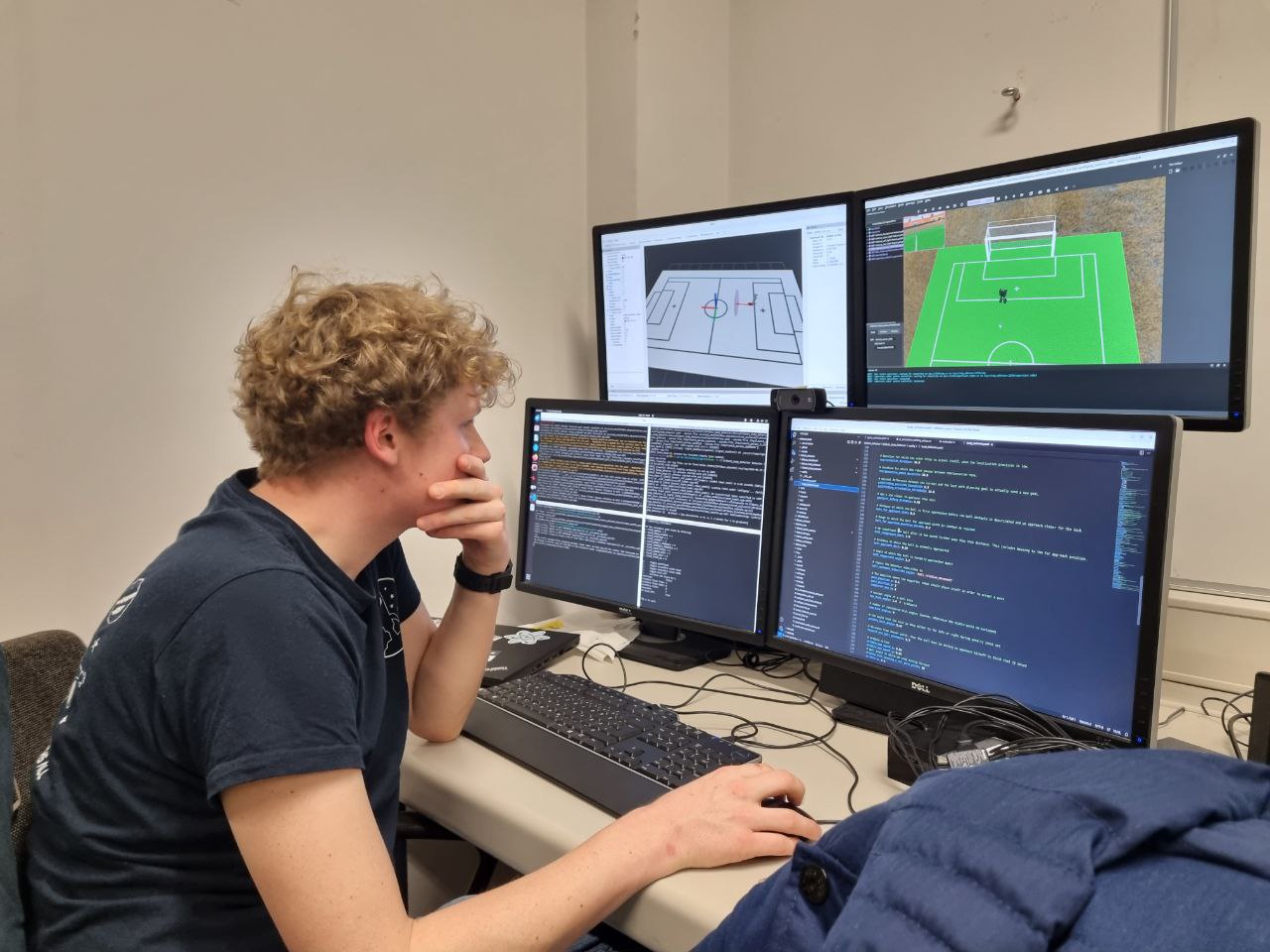
By the end of the week, we were able to walk very reliably, which allowed us to successfully move on the field and dribble the ball towards the goal. Additionally, our “Teaching Mode,” which allows positioning the robot’s motors at the push of a button, was completed. This mode was also used for a small photo session. We improved our localization and extrinsic calibration and resolved some sensor issues with our foot pressure and position sensors, opening up further possibilities for enhancing our walking. We also identified and solved a problem with the time stamps in the camera driver. As a result, we now know exactly where we’re looking, even if the robot is shaken vigorously.


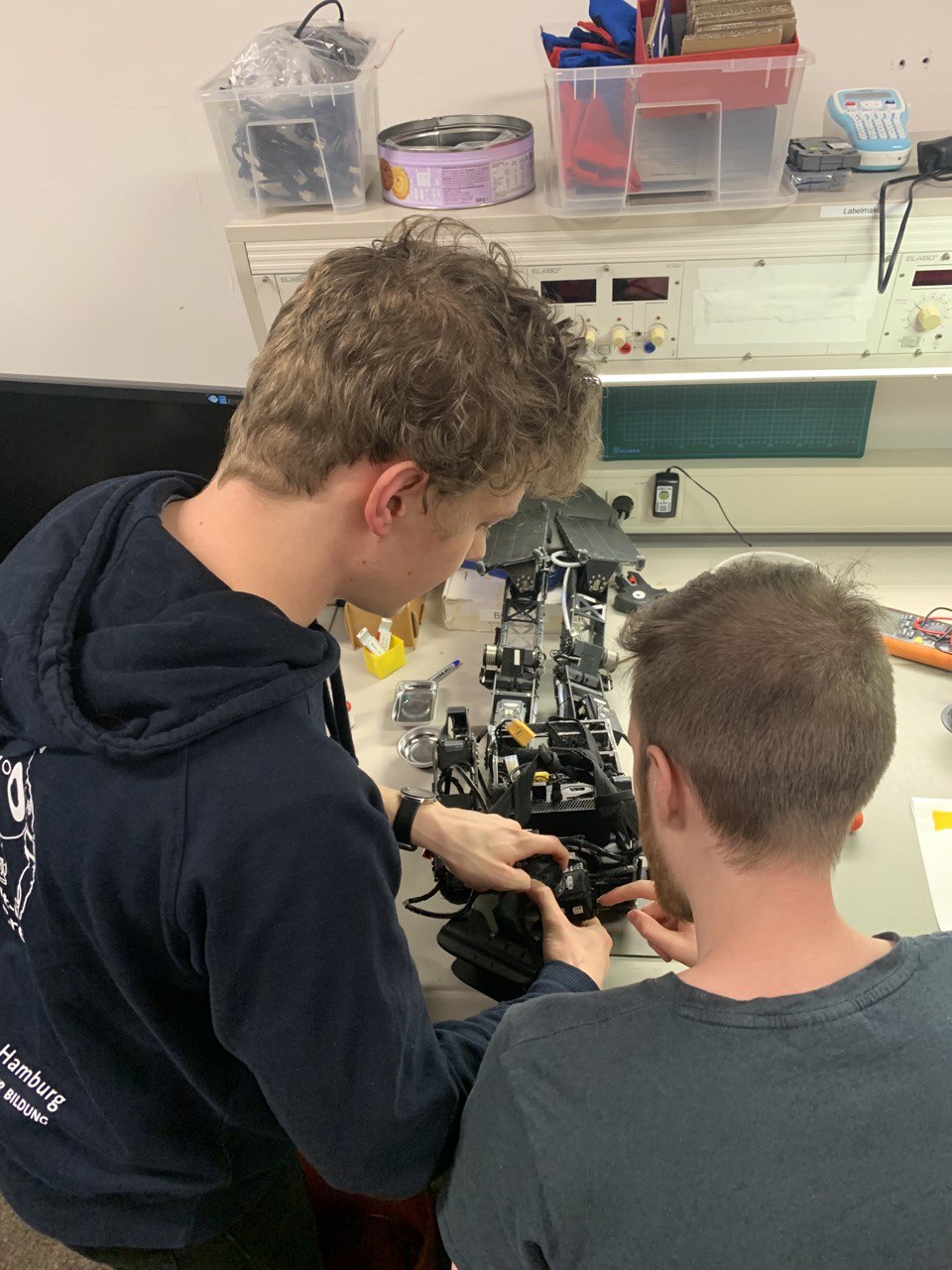
Furthermore, we worked on parts of the hardware that often break. A new case for the robot’s computer was designed, improving its mounting. Moreover, we performed general maintenance on our robots, which, for example, made the walking more stable.

In the end, we all left the Integration Week very satisfied.