Nun ist es amtlich, die Hamburg Bit-Bots haben ihr erstes Paper veröffentlicht!
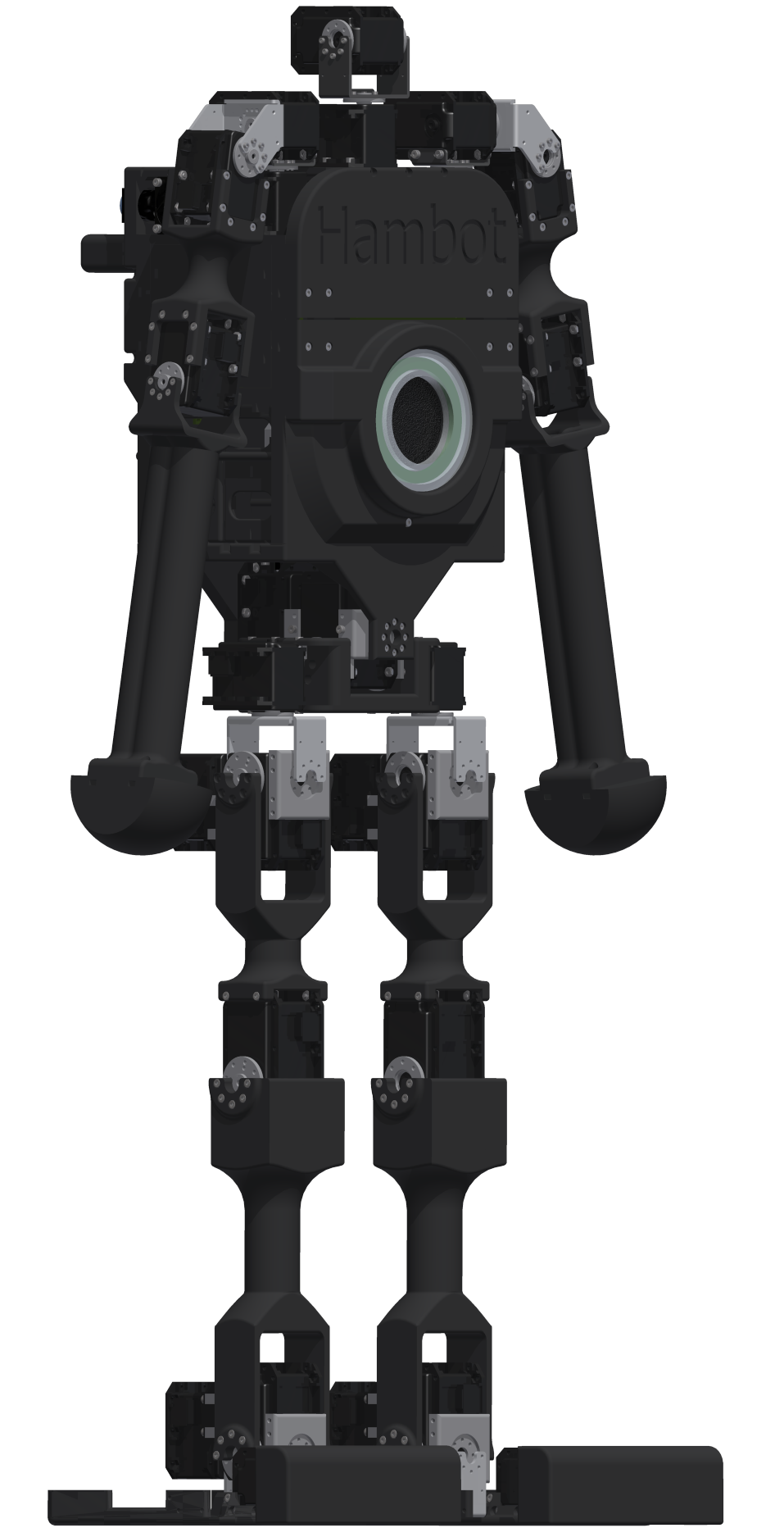
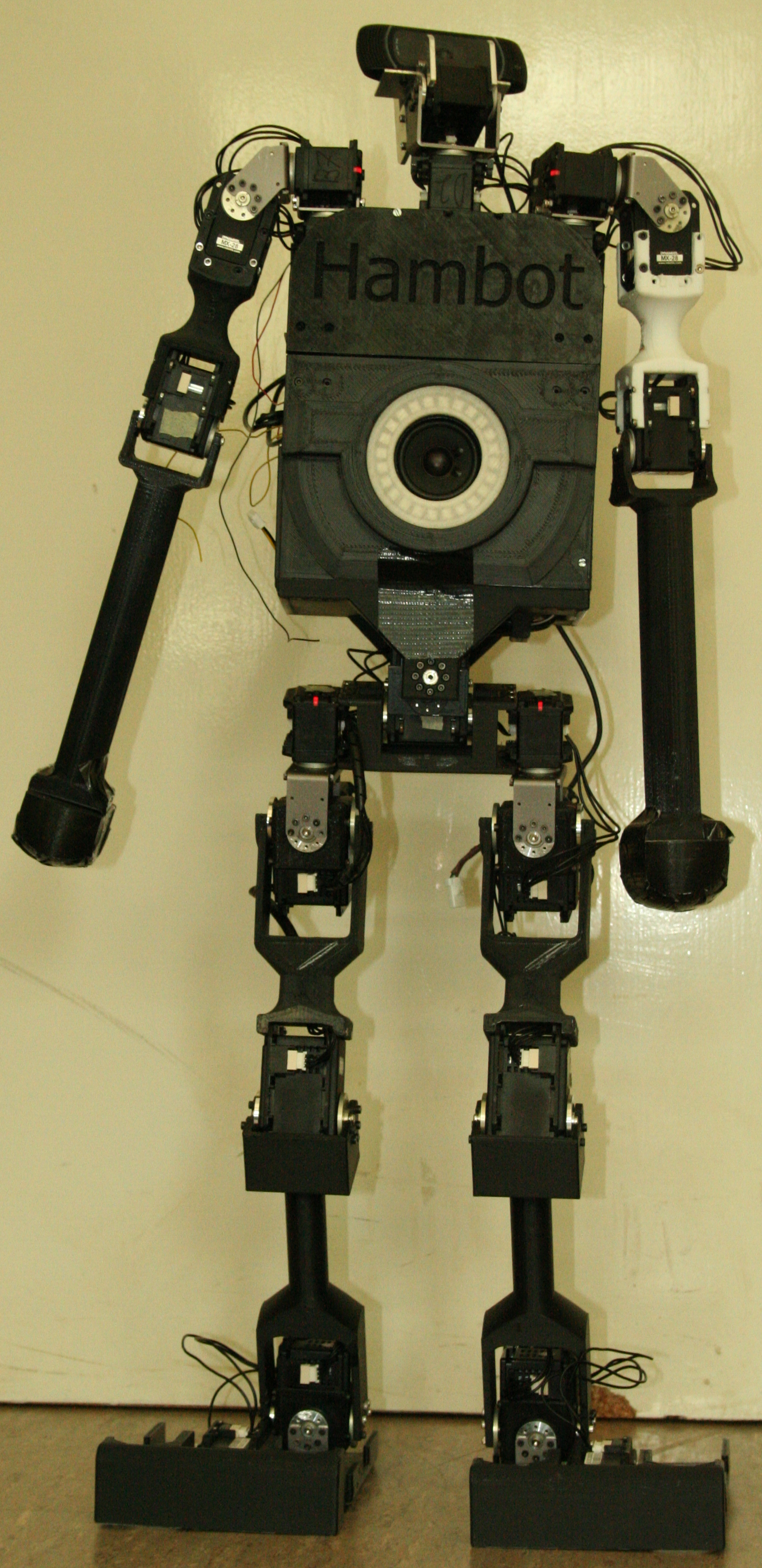
Das Thema ist unser neuer Roboter Hambot, über den wir ja bereits hier berichtet haben. Eingereicht hatten wir das Paper bereits vor einigen Wochen für den „Development Track“ beim diesjährigen RoboCup Symposium in Hefei. Bei diesem Teil des Symposium geht es um open source Entwicklungen, welche Einfluss auf den RoboCup haben. Was könnte da mehr passen als ein kompletter open source Roboter, welcher extra für RoboCup entwickelt wurde?
Auf dem Symposium darf Marc dann als Hauptautor den Roboter während einer sogenannten Postersession vorstellen. Dies ist ein typisches Verfahren bei Symposien, an dem mehrere Personen mit einem Poster ihre Entwicklung vorstellen und sich die Besucher aussuchen können, was sie sich ansehen wollen. Dies ist für uns natürlich eine super Gelegenheit für unseren Roboter zu werben und andere Teams zu überzeugen in Zukunft an dieser Plattform mitzuwirken. Auch wenn man denken könnte, dass jetzt wo unser Paper fertig ist auch der Roboter fertig ist, stimmt dies natürlich nicht. Denn wir entwickeln stetig weiter und verbessern den Roboter immer weiter, damit wir in China dieses Jahr eine gute Figur machen.
Für uns ist dies natürlich ein sehr schöner Moment, da dies eine Anerkennung für unsere wissenschaftliche Arbeit ist. Natürlich motiviert das auch sehr, weitere Paper zu schreiben und sicherlich wird dies nicht die letzte Veröffentlichung von uns sein.
Wer mehr wissen will kann natürlich unser Paper lesen:
Hambot: An Open Source Robot for RoboCup Soccer
Oder auch die Dateien runterladen und mit dem Drucken eines eigenen „Hambot“ loslegen:
https://github.com/bit-bots









 Als letzte Aktion, bevor wir nach Brasilien abgereist sind, hat Marc noch den 3D-Drucker angeworfen und einen 72 Stunden Auftrage gestartet. Dabei handelte es sich um einen Prototypen für den neuen Kopf des Nimbro-OP Roboters vom Arbeitsbereich WTM. Das Modell wurde von WTM in Autodesk Inventor auf Basis des iCub Roboters designed. Der Druck erfolgte in PLA und war bis auf kleine Fehler sehr erfolgreich.
Als letzte Aktion, bevor wir nach Brasilien abgereist sind, hat Marc noch den 3D-Drucker angeworfen und einen 72 Stunden Auftrage gestartet. Dabei handelte es sich um einen Prototypen für den neuen Kopf des Nimbro-OP Roboters vom Arbeitsbereich WTM. Das Modell wurde von WTM in Autodesk Inventor auf Basis des iCub Roboters designed. Der Druck erfolgte in PLA und war bis auf kleine Fehler sehr erfolgreich. Schon lange wollten wir gerne eine Deckenkamera in unserem Feldraum haben. Allerdings wurde es immer weiter verschoben, da wir Dinge mit höherer Priorität zu erledigen hatten.
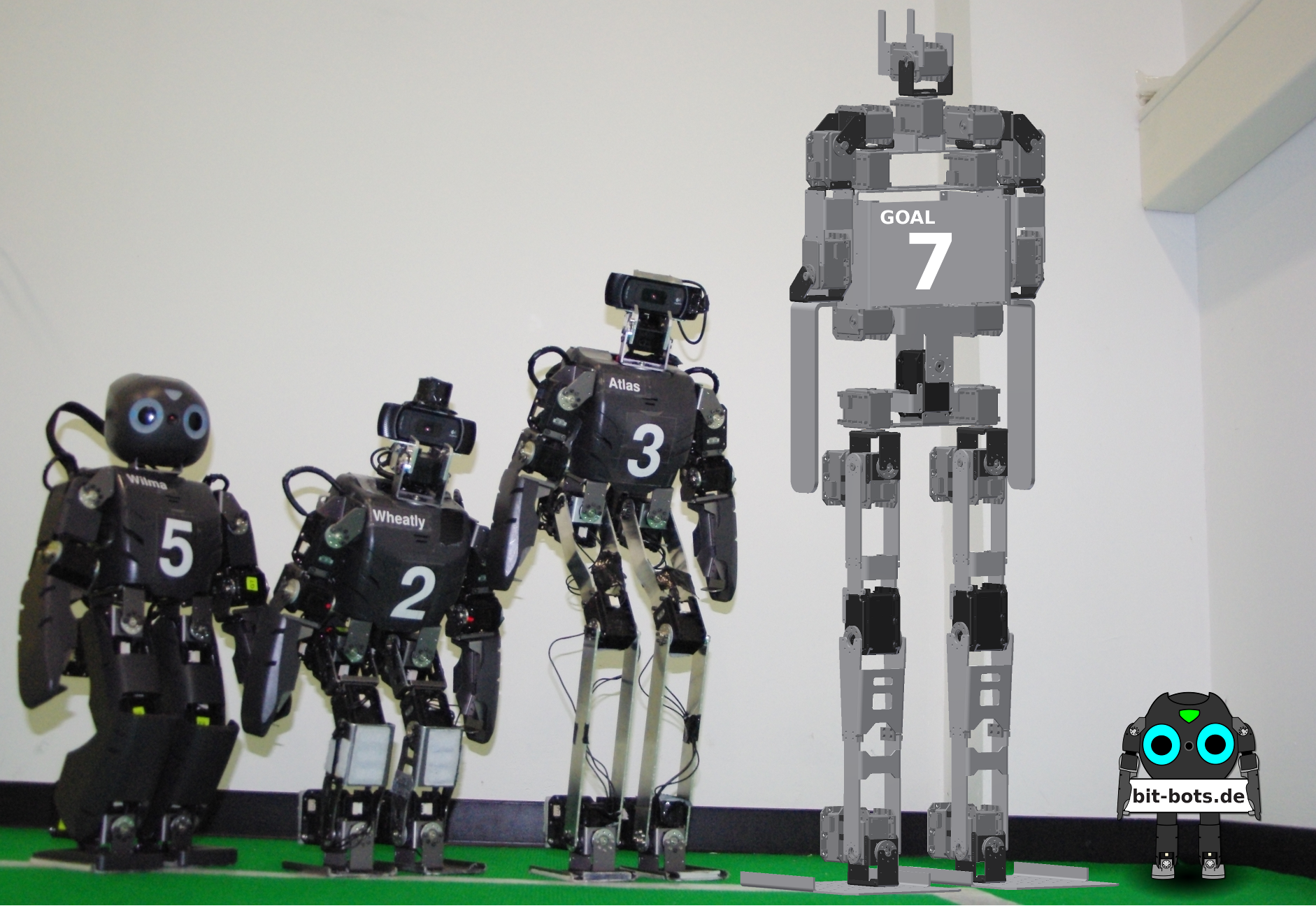
Schon lange wollten wir gerne eine Deckenkamera in unserem Feldraum haben. Allerdings wurde es immer weiter verschoben, da wir Dinge mit höherer Priorität zu erledigen hatten.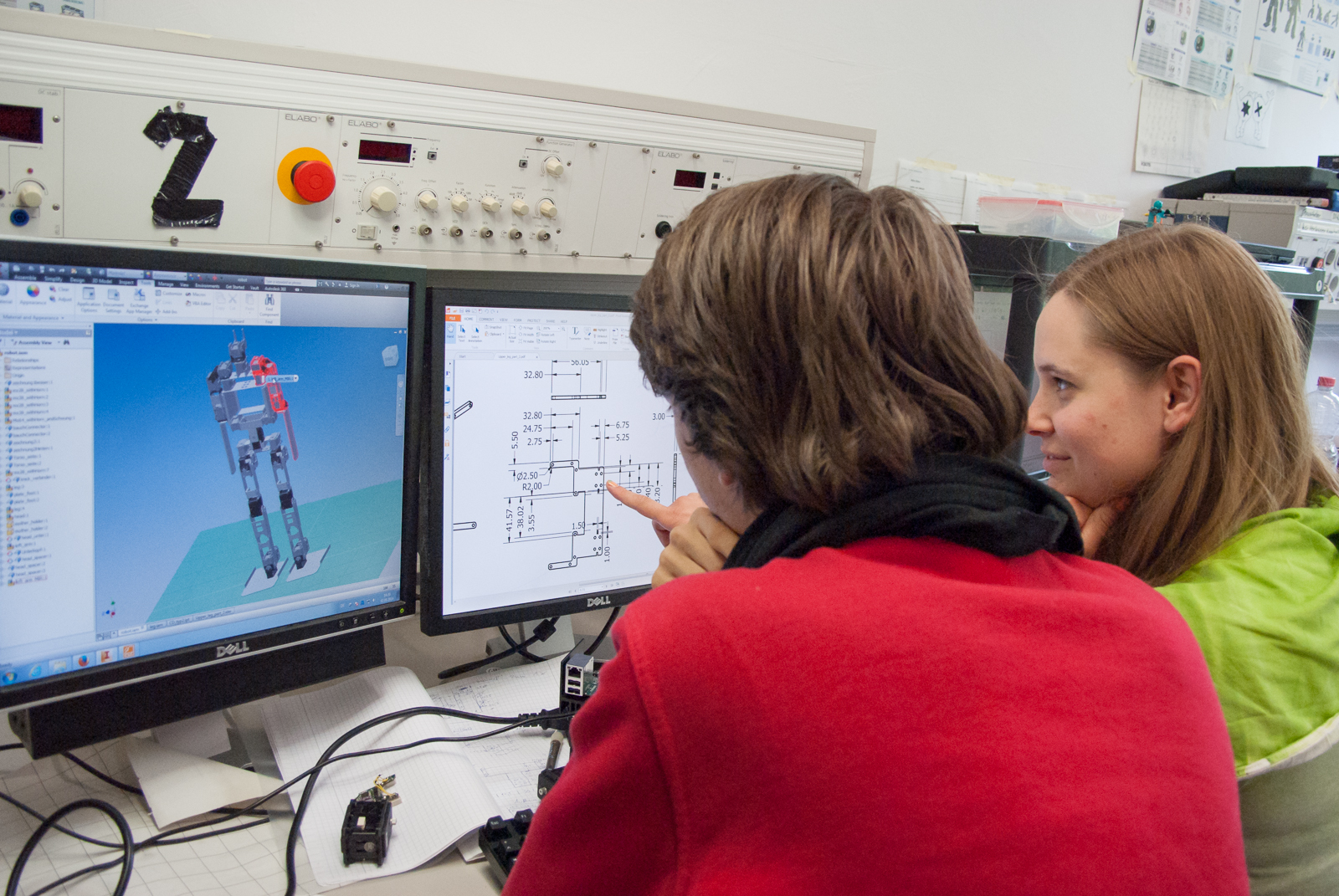 hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.
hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.