We have finished our application video for the RoboCup 2019. You can find it here:

We have finished our application video for the RoboCup 2019. You can find it here:
After being briefly introduced and tried out in RoboCup 2016, this year officially included the Drop-In Games. Four teams bring one robot each to a joint team. This encourages teamplay between teams as well as cooperation. These games are especially challenging for the referees as they have to look out for eight robot handlers (one for each robot). For the teams it is interesting to see which team has which strength. We believe that you can get a good overview of the league through these games. The results are scored in a separate scoring system. Each robot gets points for being in play while a goal is scored and more points for scoring a goal themselves.

The regular games started with a preliminary that determines the composition of the round of sixteen.
Yesterday we played SEU-UniRobot from China (loosing 0:1 to them) and ITAndroids from Brazil (ending in a 0:0). Today we played MRL-HSL from Iran loosing with a 0:1. We now stand at 3rd place in our group and we will play the NUBots from Australia tomorrow.

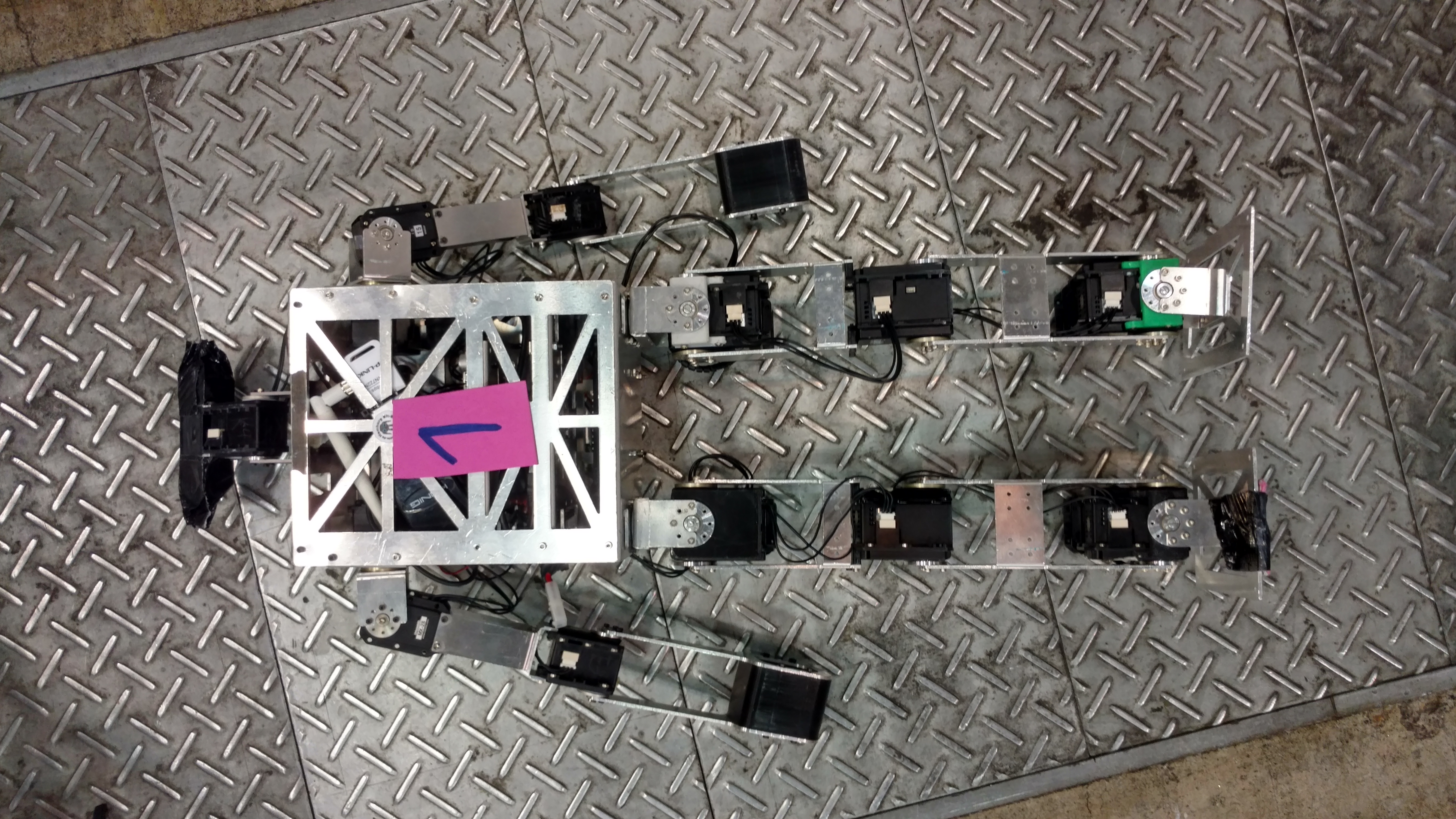
Today we were able to use our “new” robot for the first time. In actuality it is a Minibot with newly manufactured parts for the legs and arms and an old torso. The missing metal parts for the torso which we replaced with old parts were meant to arrive at our lab about a week before we took our flights to Japan but due to difficulties at the post office we never received them and they were sent back. After assembling him here at the venue we got him through robot inspection and he even received a name: We call him Frankenbot.
Furthermore we used our time to exchange with other teams about different robot platforms, since we are looking for a new one ourselves. New materials such as carbon fiber are especially interesting to us.