Am nächsten Montag, den 02.06. um 17:15 findet unser Sonderkolloquium im Konrad-Zuse-Hörsaal statt. Dabei wird es um unsere Erfahrungen im Iran und um die Entwicklung unseres neues Roboters GOAL gehen.
Monat: Mai 2014
14. Berliner Nacht der Wissenschaft
Am Samstag waren wir bei den FUmanoids auf der 14. Nacht der Wissenschaft in Berlin. Die Nacht war das erste Treffen mit den FUmanoids nach den Iran Open, und der erste größere Test unserer Software. Ab 16:30 haben wir stündlich gegen die FUmanoids gespielt und kontinuierlich unsere Software verbessert. Zwischen den Spielen wurden wir immer wieder nach den nächsten Spielen gefragt und konnten mit den Spielen und auch mit Präsentationen der Roboter das interessierte Publikum begeistern. Wir spielten meistens vor „vollem Haus“. Diese Gelegenheit wurde auch vom Professor bei den FUmanoids und dem RBB genutzt. Im Nachhinein der Nacht des Wissenschaft konnten wir Daniel auch noch sein Geschenk für „Nettigkeiten“ im Iran überreichen.
Eine gelungene Lange Nacht für die Roboter sowie die BitBots.



Deckenkamera
 Schon lange wollten wir gerne eine Deckenkamera in unserem Feldraum haben. Allerdings wurde es immer weiter verschoben, da wir Dinge mit höherer Priorität zu erledigen hatten.
Schon lange wollten wir gerne eine Deckenkamera in unserem Feldraum haben. Allerdings wurde es immer weiter verschoben, da wir Dinge mit höherer Priorität zu erledigen hatten.
So eine Kamera ist praktisch bei der automatisierten Analyse und zur Aufnahme von Trainingsdaten. Dazu klebt man den Robotern eine gut erkennbare Markierung auf den Kopf und kann dann z.B. die von ihnen abgelaufene Strecke betrachten. In unserem Fall brauchen wir die Kamera vor allem um Trainingsdaten aufzunehmen, mit der unsere Roboter lernen sollen sich zu lokalisieren. Dazu nimmt der Roboter mit der eigenen Kamera ein Bild auf und die Deckenkamera bestimmt gleichzeitig an welcher Position der Roboter steht. Am Ende haben wir dann (hoffentlich) eine Menge Bilder aus Roboterperspektive zusammen mit mit der tatsächlichen Position und Ausrichtung. Anschliessend soll der Roboter dann mit Hilfe von neuronalen Netzen lernen sich zu lokalisieren. Das bedeutet, dass er markante Dinge auf Feld, z.B. die Tore und Linien, benutzt um daraus seine eigene Position auf dem Feld zu bestimmen.
Natürlich werden wir euch weiterhin über unsere Entwicklungen in diesem Bereich auf dem Laufenden halten.
Neues Roboter Design mit Autodesk Inventor
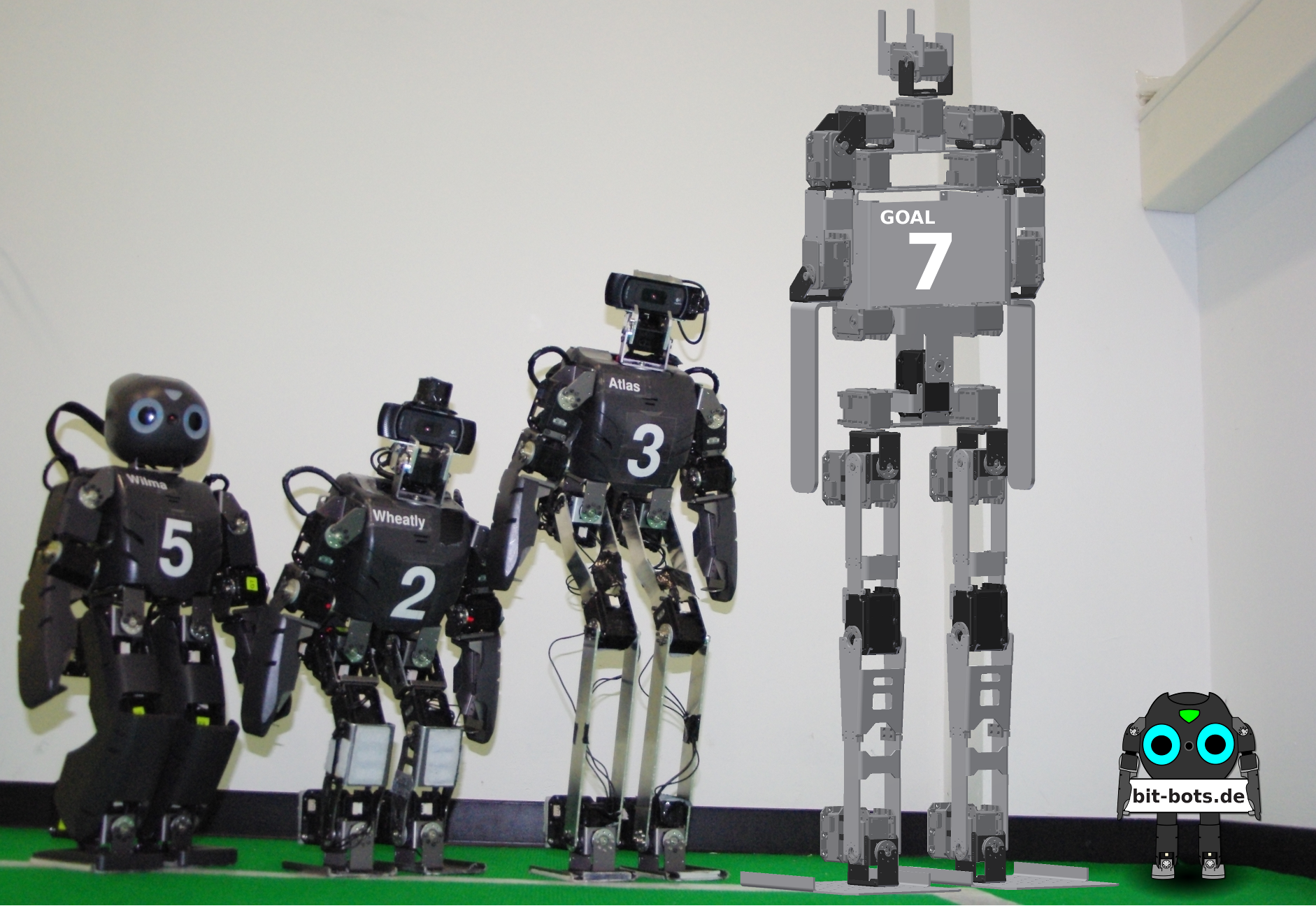
Wie i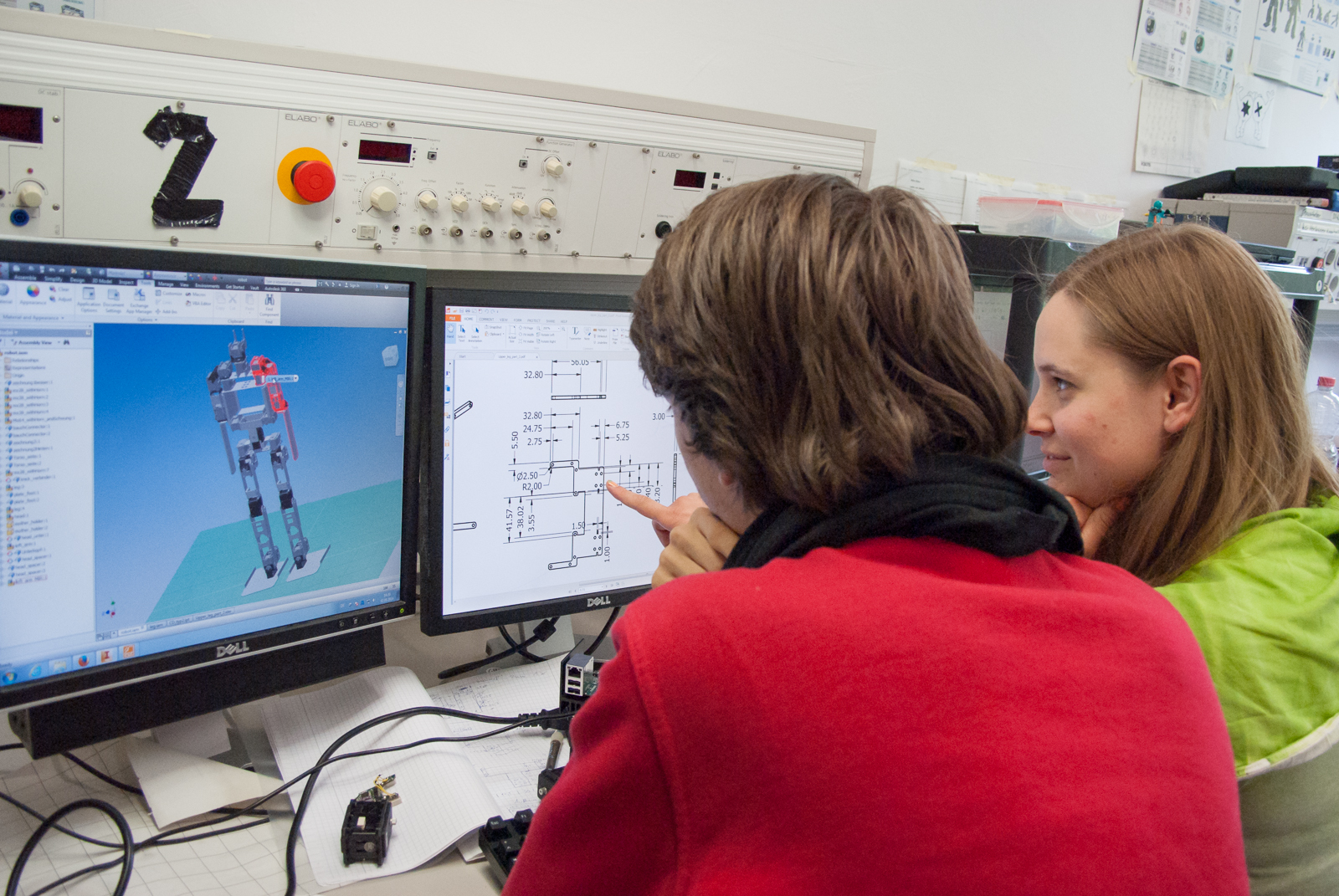 hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.
hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.
Die Motoren, neuen Metallteile, wiederverwendete Teile vom Darwin und ein Haufen Schrauben und Muttern können dann auch in Inventor virtuell zusammengebaut werden. Dies ist besonders praktisch, da man so direkt sieht, ob man die Teile passend konstruiert hat. Außerdem kann man sogar die Motoren beweglich machen und so interaktiv die Bewegung des Roboters testen. Dies ist für uns sehr wichtig um zu prüfen wie viel Bewegungsspielraum die einzelnen Gelenke haben.
Unsere ersten neuen Aluminiumteile werden diese Woche gefräst und wir können es kaum erwarten sie in Echt zusehen und den Prototypen zusammen zu bauen.
Aber auch elektrotechnisch verändert sich einiges bei uns. Doch dazu bald mehr, ihr dürft gespannt sein 😉
Darwin auf „Stelzen“

Schon 2 Tage nach der Rückkehr aus dem Iran gab es den ersten Prototypen dazu. Wir haben die Beine des Darwins mit eigens gefertigten Aluteilen deutlich verlängert – und waren selber überrascht als der Roboter nach Anpassung dreier Parameter in der Software anfing zu laufen. Zwar etwas wackelig, aber ohne dass man ihn stützen muss. Der Schwerpunkt liegt nun deutlich höher – und theoretisch dürften wir nun unsere Füße lächerlich groß gestalten (eine Anpassung wird es sicher geben, aber wenn wir sie maximal groß machen treten wir uns selbst auf die Füße).

Bevor das ganze Einsatzfähig sein wird muss aber noch viel getan werden, z.B. brauchen wir auch größere Arme um mit so langen Beinen noch aufstehen zu können. Und ohne kräftigere Motoren in den Knien können wir die längeren Beine auch nicht voll ausnutzen (für kräftige Tritte). Aber experimentell ist für uns vor allem die Erkenntnis von Wert dass unser aktueller Laufalgorithmus sich vergleichsweise leicht auf Änderungen des Schwerpunktes einstellen lässt.
Geburtstagsfeier
Am Ostermontag hat sich beinahe die gesamte AG getroffen um ausnahmsweise nicht zu arbeiten, sondern den dritten Geburtstag der RoboCup AG zu feiern. Es wurde viel gegessen, gelacht und sogar ein kurzes spontanes Planungstreffen veranstaltet.
















