Am 3. Oktober hieß es bei uns: Türen auf mit der Maus. Jedes Jahr öffnen zahlreiche Firmen und Vereine an diesem Tag ihre Türen für interessierte kleine Entdecker. Der diesjährige Maustag stand unter dem Motto „SpielZeit“, das für uns nicht passender hätte sein können. Als einer von 850 Veranstaltungsorten luden wir mit großer Freude Robotikinteressierte in unser Labor ein. Mit der tatkräftigen Unterstützung des MIN-Dekanats der Universität Hamburg haben wir ca. 90 Teilnehmer:innen das Programmieren näherbringen können und außerdem zwei unserer Roboter – Donna und Jack – einen Auftritt als Torjäger auf dem Feld spendiert.
Nach der Demonstration auf dem Feld hatten unsere kleinen Gäste noch die Möglichkeit, Fotos mit unseren beiden Fußballstars zu machen. Der Tag hat uns sehr viel Freude bereitet, im Namen der Betreuer:innen bedanken wir uns bei allen Gästen und ihren Begleitpersonen. Wir hoffen ihr behaltet euer Interesse an der Robotik bei.
Von dem 15. bis zum 21. Juli fand der RoboCup 2024 in Eindhoven statt. Um ausreichend Vorbereitungszeit vor Ort zu haben, fuhren wir bereits am 12. Juni los. Auch dieses Jahr haben wir uns entschieden, für die Fahrt ein Auto zu mieten, das uns in Eindhoven begleitet und auch wieder heil zurückgebracht hat. Durch das Auto hatten wir viel Platz für alles Mögliche, und den Platz haben wir ziemlich gut ausgenutzt.
In Eindhoven wartete dann das Social Hub auf uns (unsere Bleibe für die kommenden Tage). Hier haben wir dann zusammen gekocht und gemeinsam unsere Roboter gecheckt, an ihnen geschraubt und kleine Softwareanpassungen gemacht.
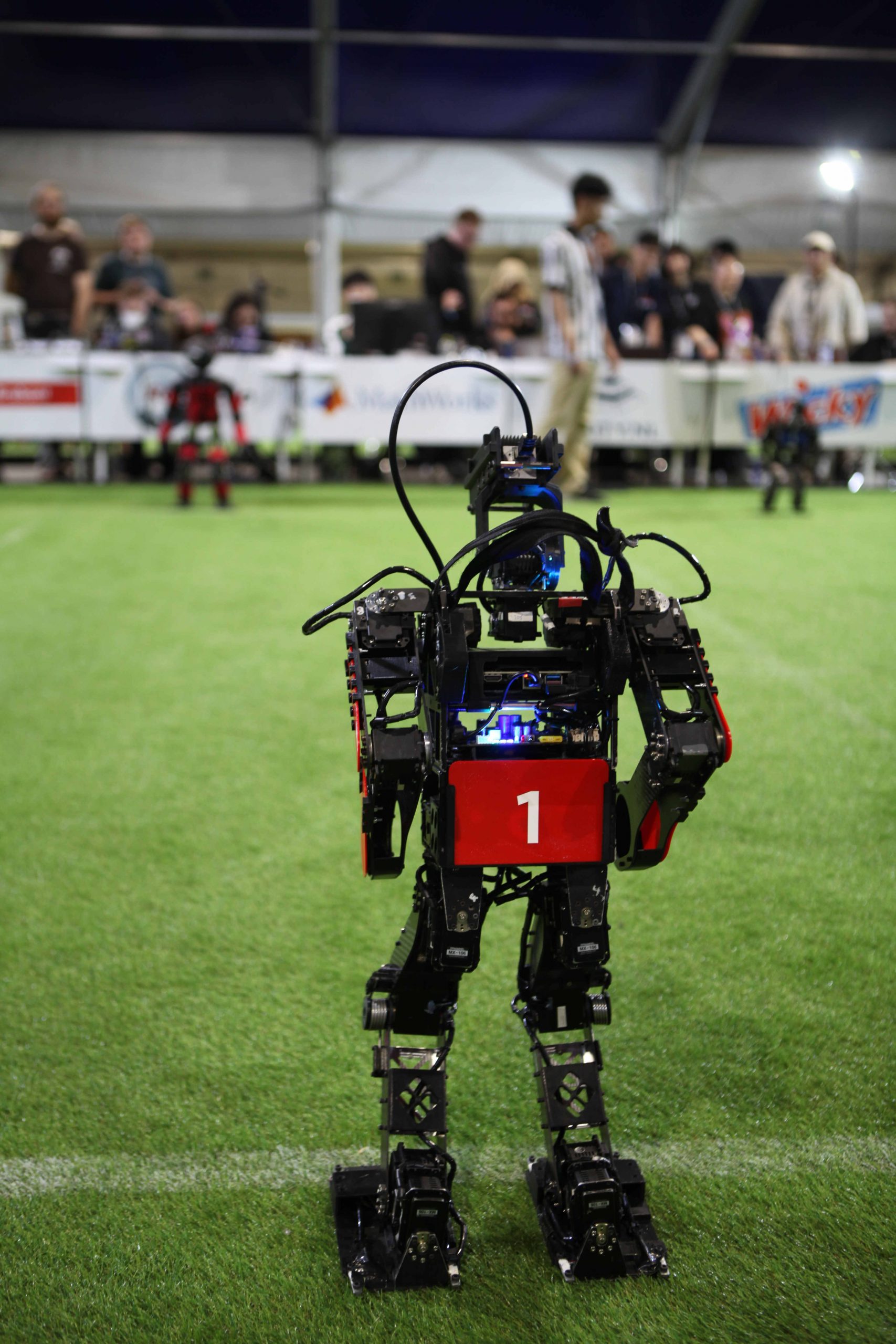
Am Montag, dem 15.07.2024, konnten wir dann in die Halle … oder besser gesagt ins Zelt. Hierbei handelte es sich um ein recht großes Zelt mit festen Platten auf dem Boden, keinen Fenstern und einer sehr variierenden Temperatur. Es gab eine Klimaanlage, die bei kühleren Außentemperaturen zu sehr kühlte und gegen höhere Außentemperaturen nicht so gut ankam. In dem Zelt waren diverse Fußballfelder (4 für unsere Liga, eines für die Adult Size direkt nebenan), eine Roboterband, eine Bühne, die Logistics-, @Home- und @Work-Ligen und ein Merch-Shop.
Ziemlich bald machten wir uns an den Aufbau, richteten unseren Tisch ein, brachten Roboter aufs Feld und benutzten unseren neuen Flasher-Koffer zum Testen. Der Flasher-Koffer beinhaltet alles, um 4 Roboter mit Strom und einer Verbindung zu einem Computer zu versorgen. Er soll vor allem in der Vorbereitung für ein Spiel eingesetzt werden, um alle Roboter zu starten und mit der neuesten Software zu bespielen. Doch auch zum Testen bringt er alles Notwendige mit.
Roboter wird gechecktEinsatz des Flasher-Koffers: mehrere Roboter werden für ein Spiel gleichzeitig gestartetUnser Teamtisch
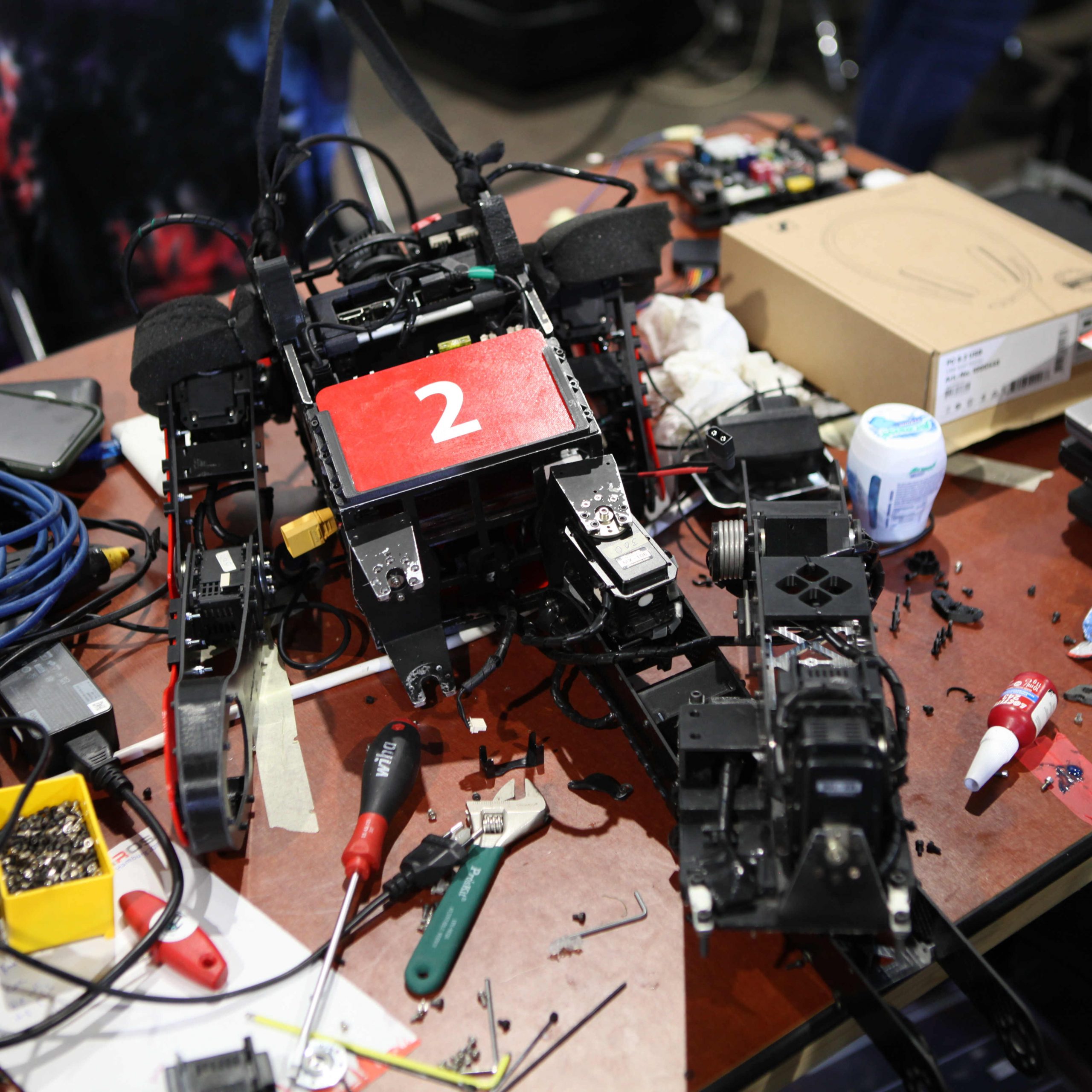
Generell haben wir während dieser WM sehr wenig Softwarearbeit gemacht, da wir sehr zufrieden mit unserem Softwarestand waren und mehr an den Robotern herumgeschraubt. Wir haben relativ schnell entschieden, die Oberschenkel Spacer, die die parallelen Beinplatten auseinanderhalten, gegen stabileren 3D-Druck auszutauschen. Zudem haben wir die Stollen von unseren Füßen abgeschraubt und stattdessen die Schrauben direkt als Stollen benutzt, weil das Kunstgras sehr rutschig war.
An Jack wird geschraubtAmy bereit zum Einlaufen
Die Ruhe vor den Spielen
Am 18.07.2024 wurde es dann etwas ernster: Die Drop-in-Spiele begannen. In den Drop-in-Spielen stellt jedes Team nur einen Roboter, der dann mit Robotern von anderen Teams zusammen gegen eine ähnlich zusammengestellte Gruppe spielt. Generell gibt es in diesen Spielen wenig Teamstrategien, da die Roboter leider meist nicht miteinander kommunizieren. In diesen Spielen gibt es Punkte, wenn unser Roboter Tore erzielt. Zudem gibt es Punkte für Roboter, die im selben Team spielen und auf dem Feld stehen, wenn ein Roboter ein Tor erzielt. Am Ende der Drop-in-Spiele gab es 4 Teams, die Tore gemacht haben, und die Bit-Bots waren eins davon! Wir haben das erste Mal überhaupt ein Tor in einem Drop-in-Game geschossen. Doch es gab auch einen Rückschlag: Einer unserer Roboter (Amy) hat sich bei einem Sturz einen Schaden in der Elektronik zugezogen und konnte dadurch den restlichen RoboCup nicht mehr eingesetzt werden. Nun hatten wir also nur noch drei Roboter für die kommenden Spiele.
Drop-In Spiel: Roboter aus verschiedenen Teams spielen gemeinsam
Wir schießen ein Tor in einem Drop-In Spiel
Nach den Drop-in-Spielen folgte die Gruppenphase. Hier waren wir zusammen in einer Gruppe mit den IT Androids, den NUbots und Ichiro. Unser erstes Spiel gegen die IT Androids gewannen wir mit 4:0. So viele Tore hatten wir bisher in einem realen Spiel noch nie geschossen. Gegen die NUbots hatten wir am Anfang der WM schon mal ein Freundschaftsspiel gewonnen. Daher war die Chance hoch, auch dieses Spiel zu gewinnen. Leider wurden wir auf dem Mittelkreis von den NUbots so unglücklich umgeworfen, dass wir uns verirrten. Eigentlich nutzt der Roboter die IMU beim Hinfallen, um dem entgegenzuwirken, aber das hat aus einer Kombination von Gründen nicht funktioniert, sodass unser Roboter ein Tor für das gegnerische Team erzielte. Deshalb beendeten wir dieses Spiel mit einem Gleichstand von 1:1. Das letzte Spiel in dieser Runde war eines der Spannendsten, da es viele Zweikämpfe und knappe Tore gab. Zudem hatten wir per Zufall einen komplett blauen Ball bekommen, auf den unsere Bilderkennung nicht so gut eingestellt war (normalerweise haben die Bälle immer etwas Weiß). Dies führte dazu, dass unsere Roboter den Ball aus der Entfernung nicht mehr sehen konnten und der Ball fast eine Halbzeit lang unberührt direkt vor dem gegnerischen Tor lag. Am Ende verloren wir das Spiel mit 0:2. Durch die Probleme mit der Ballsuche entschieden wir uns nach diesem Spiel, unser Ballsuchverhalten umzuschreiben und den Roboter an verschiedene Punkte auf dem Feld laufen zu lassen, damit er dort sucht, wenn er von seinem initialen Ort den Ball nicht erkennt.
Blauer Ball ist nicht so gut zu erkennen, interessanter Zweikampf an der Mittellinie
Im Achtelfinale trafen wir dann auf die WF Wolves, das einzige andere deutsche Team innerhalb der Humanoid Kid Size Liga. Von diesem Team stammt auch unsere Roboterplattform ab. Daher sehen unsere Roboter sich ziemlich ähnlich. Die Wolves waren auch das eine Team gewesen, gegen das wir auf der German Open in Kassel etwas früher im Jahr mehrmals gespielt und auch gewonnen hatten. Daher kannten die Wolves uns auch schon recht gut und versuchten, uns vom Tore-Schießen abzuhalten. Dies sorgte für viele Stürze und dadurch auch viele Schäden am Roboter. Letztendlich gewannen wir diese Materialschlacht mit 2:0, wobei wir beide Male den Ball nah an das gegnerische Tor geschossen hatten, der Gegner dann jedoch den letzten Kick ins eigene Tor ausführte.
Roboter Bein wird repariert.
Für das Viertelfinale sollte Kura unser Gegner sein. Kura ist ein sehr starkes Team, das es letztendlich auch ins Finale geschafft hat. Wir haben uns darauf eingestellt, dass wir verlieren würden, haben aber trotzdem noch ein wenig an möglichen Verbesserungen gearbeitet: ein Torhüter-Verhalten, bei dem der Roboter in die Knie geht, um mehr Fläche abzudecken, schnelleres Laufen und längere Kicks. Doch mittlerweile war unsere Hardware schon ziemlich am Ende, und die langen Kicks des Gegners waren zu gut, sodass wir 0:6 verloren.
Aufgenommen nach dem Spiel gegen Kura
Damit sind wir im Viertelfinale des RoboCups ausgeschieden, was interessanterweise das gleiche Ergebnis ist, wie letztes Jahr in Bordeaux. Trotzdem haben wir uns deutlich verbessert: letztes Jahr war richtige Positionierung vor dem Ball und ein wenig Dribbeln das Beste, was unser Roboter geschafft hat, und ins Viertelfinale sind wir gekommen, weil wir den Ball beim Elfmeterschießen öfter berührt hatten. Dieses Jahr haben wir nicht nur den Ball gekickt, sondern auch mehrere Tore geschossen und konnten das Achtelfinale klar für uns entscheiden. Wir sind also von einem quasi leeren Feld zu einem Team im Mittelfeld aufgestiegen, das jetzt auch richtig mitspielen kann. Also ein sehr gelungener RoboCup für unser Team.
Am Freitag, dem 21.06.2024 fand die ITCS, eine Karrieremesse und Tech-Konferenz, in Hamburg statt. Die Bit-Bots sind eingeladen worden, einen Stand zu machen und einen Vortrag zu halten und wir haben angenommen.
Aufbau unseres Messestands
Schnell war unser Stand aufgebaut und der erste Roboter zusammengeschraubt (für den Transport müssen wir immer den Kopf abschrauben) und gestartet. Es dauerte nicht lange, bis auch schon die ersten fragenden Besucher kamen. Schnell wurde klar, dass die Fragen hier viel mehr in die technologische Tiefe gingen. Umso mehr freuten wir uns auch anschaulich zu zeigen, was unser Roboter alles kann und was unter der Oberfläche an Software vorhanden ist.
Walking-Demonstration
Allgemein sind wir jedoch als Aussteller etwas herausgestochen, da wir keine Firma sind, die nach neuen Talenten sucht. Umso mehr haben wir aber auch die Gelegenheit genutzt, selbst etwas zu networken.
Roboter rechts von Energy Robotics (waren sehr nette Standnachbarn)
Gegen 14 Uhr wurde es kurzzeitig etwas aufregend. Es wurde nämlich Zeit, die Roboter für unseren Vortrag vorzubereiten. Um 14:30 Uhr haben wir dann unseren Vortrag darüber gehalten, warum man mit Robotern Fußball spielen sollte. Schnelle Antwort: Es gibt mehr als nur einen guten Grund.
Am 01.06.2024 öffnete das Deutsche Elektronen Synchrotron (kurz DESY), ein naturwissenschaftliches Forschungszentrum in Hamburg, seine Türen für über 15.000 Gäste. Verschiedene Forschungsgruppen zeigten ihre Forschung und wir waren mir unseren Robotern auch dabei.
Unser Stand war direkt ein einem der Eingänge, sodass viele der Besucher an uns vorbeikamen. Dadurch hatten wir auch durchgehend eine Traube an Menschen vor unserem Stand stehen. Darunter auch viele Kinderaugen, die aus dem Staunen nicht mehr raus kamen. Einen Fußball spielenden Roboter sieht man schließlich nicht alle Tage. Den ganzen Tag lief einer unserer Roboter durchgehend und wurde immer wieder zur Demonstration genutzt. Wir zeigten unser Laufen, den Kick und das Torjubeln. Bei einem zweiten Roboter haben wir nur die Vision laufen lassen, welche dann live visualisiert wurde. Immer wieder durften auch die Kinder Hand anlegen und den Roboter in selbst ausgedachte Posen bringen, um mit dem Roboter zusammen von ihren Eltern fotografiert zu werden.
Wir haben an diesem Tag auch das eine oder andere über unsere Roboter gelernt: Unser Demoroboter lief an diesem Tag knapp acht Stunden durchgängig (natürlich mit mehreren Akkuwechseln), was sehr beeindruckend ist, da sie normalerweise nur zwei Halbzeiten à zehn Minuten durchhalten müssen, bevor sie wieder Pause bekommen. Außerdem hat unsere Vision hin und wieder auch Kinder als Kid-Size-Roboter erkannt.
Generell hatten wir sehr viel Spaß und haben den Austausch mit den Besuchern sehr genossen.
Vom 17.04 bis zum 20.04.2024 fand die erste GO (kurz für German Open) seit 2019 in Kassel statt. Natürlich waren wir mit unseren Robotern auch wieder dabei. Schon am 16.04 haben wir uns auf dem Weg nach Kassel gemacht. Die meisten von uns (Laura, Jörn, Jan- Niklas, Jan und Lea) sind mit der Bahn gefahren, die ca. eine Stunde Verspätung hatte. Da sind Timon und Flo mit dem Mietwagen, inklusive Robotern und weiterem Wettbewerbs Utensilien, besser durchgekommen und haben uns in unserer Unterkunft mit warmen Essen empfangen. Gesättigt konnten wir dann ein Billard Match betrachten (im Wohnzimmer stand nämlich ein großer Billard Tisch) und dann in die Betten hüpfen. Am nächsten Tag ging es dann früh zur Messe. Dort wurde erstmal der Arbeitsplatz eingerichtet, die Roboter wurden rausgeholt und dann ein Rundgang über das Gelände gemacht. Danach haben wir fleißig vorher besprochene To Dos abgearbeitet, die sowohl auf die Software als auch auf die Hardware bezogen und in Form von beschrifteten Zettel immer gut einsehbar waren. Der erste Tag der GO, auch Set Up Tag ist vor allem dafür, alles aufzubauen und die Roboter an die neue Umgebung zu gewöhnen. Dementsprechend haben auch wir das „mentale Modell“ unserer Roboter bezüglich der Feldgröße angepasst. Es gab viel zu tun und dementsprechend flog der Tag auch schnell vorüber.
Hardware Arbeit Computer HaufenSoftware Arbeit
Am zweiten Tag waren dann insgesamt drei Spiele. Direkt im ersten Spiel konnten wir das Ziel eines selbst erzielten Tores erreichen. Tragischerweise war jedoch unser Roboter auf der Mitte des Spielfeldes hingefallen und war sich durch die Symmetrie des Spielfeldes nicht mehr sicher, welche Seite seine ist. Leider hat er sich falsch entschieden und hat ein Eigentor gemacht. In der zweiten Halbzeit gelang es uns dann jedoch erneut ein Tor zu schießen, sodass wir mit 1:1 aus dem Spiel hinaus gingen. Das zweite Spiel des Tages war ein Freundschaftsspiel gegen ein Team der SPL (Standard Platform Liga). In der SPL spielen alle Teams mit demselben Roboter Modell, einem NAO. Trotz der unterschiedlichen Regeln in den beiden Liegen ist es möglich mit ein paar Tricks Spiele zu ermöglichen. Ausgegangen ist das Spiel mit einem 0:0. Um etwas Material zu schonen haben wir in den ersten beiden Spielen mit nur zwei Robotern gespielt, doch beim dritten Spiel haben wir dann einen dritten Roboter hinzugefügt. Das hat sich auch ausgezahlt, denn wir konnten siegreich mit einem Stand von 2:0 aus dem Spiel gehen. Auch an diesem Abend haben wir wieder selber gekocht und ein wenig Billard gespielt.
Rote Nao 2 gegen unsere rote 2SPL gegen Humanoid SpielAufstellung zum Anstoß
Am dritten Tag haben wir auch wieder in allen Spielen innerhalb unserer Liga gewonnen und ein Freundschaftsspiel gegen die SPL absolviert. Mittlerweile sind wir auch immer eingespielter in der Vorbereitung und Durchführung geworden, was unter anderem auch durch fest definierte Rollen während des Spiels erreicht wurde. Zudem haben wir auch eine neue Struktur zur Vor- und Nachbesprechung benutzt, die uns bei Spielen sehr geholfen hat. In den Tagen vorher ist uns aufgefallen, dass in dem Garten unserer Unterkunft ein Grill steht und so haben wir dann am Abend ein anderes Humanoid Team (die WF Wolves) mit Erlaubnis des Gastgebers zu einem gemeinsamen Grillabend eingeladen. Hier wurden neben Billard auch mitgebrachte Kartenspiele gespielt und sich in guten Gesprächen ausgetauscht.
Da unsere Unterkunft leider nicht für die ganze Zeit verfügbar gewesen war, mussten wir am vierten Morgen schon packen und alles mit zur Messe nehmen. Durch gute Vorbereitung am Abend, war der Morgen dann trotzdem sehr entspannt und Timon konnte alle anderen mit seinen selbst gemachten Pancakes erfreuen. Gut gestärkt sind wir dann in der Messe die nächsten Spiele angegangen, die wir, wie am Tag zuvor innerhalb unserer Liga gewannen. In der Zeit zwischen den Spielen wurde auch sehr fleißig programmiert, damit die Spiele noch flüssiger laufen.
Vor allem auch durch das gute Monitoring während des Spiels (es ist jedem Team erlaubt mit einem Laptop Daten der Roboter zu empfangen) konnten Fehler schnell lokalisiert und teilweise sogar innerhalb eines Spieles behoben werden. Den Abend haben wir dann in einem Hotel verbracht, dass mehr innerhalb der Stadt lag.
Bereit zum Roboter startenWir in rot gegen Wolves in blauSpielvorbereitung
Samstag war dann unser letzter Tag und auch der wichtigste Tag. Er begann mit einem Freundschaftsspiel gegen die SPL. Dabei haben sich die SPL Teams in der Halbzeit gewechselt, sodass wir in der zweiten Halbzeit gegen die Gewinner der SPL Liga spielen durften. Das selbe Team hatte letzten Sommer bei der WM in Bordeaux gegen den Weltmeister der Humanoid Liga gewonnen. Daher haben wir nicht erwartet zu gewinnen und waren dann auch mit unserer Niederlage recht zufrieden. Gegen 13:30 Uhr kam dann der wichtige Teil des Tages: das Finalspiel unserer Liga. Unseren Robotern war langsam anzusehen, dass sich die Spiele der letzten Tage negativ auf die Hardware auswirkten. Sie fielen zum Beispiel beim Kick häufiger mal hin, schafften es aber auch relativ schnell wieder aufzustehen. Innerhalb der ersten Halbzeit schafften wir es dann auch mit einem Tor in Führung zu gehen. In der zweiten Halbzeit dauerte es dann deutlich länger den Ball vor das Tor zu bekommen, da wir bei jedem Kick hinfielen und dann den Ball neu anlaufen mussten. Schließlich schaffte es dann unser Gegner den Ball, den wir bis kurz vor die Torlinie gespielt hatten, ins Tor zu schießen. Da hatten dann beide Teams Grund zum jubeln. Das gegnerische Team, weil sie tatsächlich ein Tor geschossen hatten und wir, weil wir ein Tor mehr hatten. Weitere Tore gab es dann auch nicht, womit wir dann das Finale mit 2:0 gewonnen haben! Nach dem Finale gab es dann erstmal etwas zu essen. Gestärkt haben wir uns dann ans packen gemacht. Doch dabei müssen wir dann eine kleine Pause machen, in der wir zur Siegerehrung gegangen sind und unseren Pokal abgeholt haben. Dabei haben wir den anderen Siegern auch kräftig applaudiert. Lange brauchten wir danach nicht mehr um alles gepackte ins Auto zu verladen und uns auf dem Weg nach Hause zu machen. Unser Fazit der German Open: Wir haben eine Bestleistung in unserer AG Geschichte erzielt und sind damit sehr zufrieden.
Spiel gegen Wolves (blau)Bit-Bot mit PokalBereit zum Einlaufen
Das Schnupperstudium bietet Schülerinnen und Schülern in den Ferien eine Woche lang einen Blick in das Studentenleben. Dabei gibt es neben der Vorstellung verschiedener Forschungsfelder, Gespräche mit Berufstätigen und Studenten, sowie einer Probevorlesung auch Projektarbeit für die Schüler. Dabei bieten die Projekte einen praktischen Einstieg, bei dem sie jeden Tag der Schnupperstudiumswoche weiterarbeiten können. Wir als AG haben während dieser Woche, die vom 25.03.24 bis zum 28.03.24 ging, eine Projektgruppe begleitet, sowie unsere Roboter in Forschungsdemos den anderen Gruppen vorgestellt.
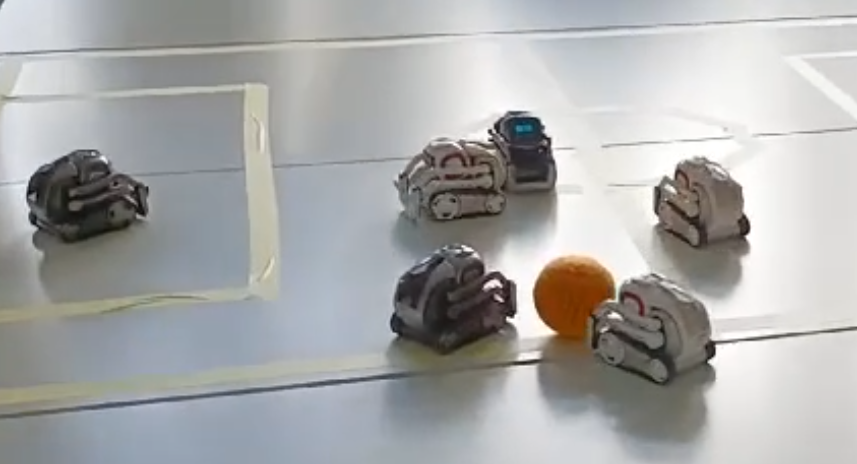
Zu Beginn der Woche haben wir uns in der Projektarbeit mit sogenannten Cozmos beschäftigt. Hierbei handelt es sich um kleine Roboter, die über eine App mit einer Scratch ähnlichen Sprache programmiert werden können. Gerne hantieren diese Roboter auch mit kleinen Würfeln, die mit zu ihrer Ausstattung gehören und von ihnen angehoben oder gerollt werden können. Die Schüler durften den Robotern durch immer anspruchsvollere Aufgaben das Fußball spielen „beibringen“. Am Anfang des dritten Tages war dann eine kleines Spiel mit drei gegen drei Robotern möglich.
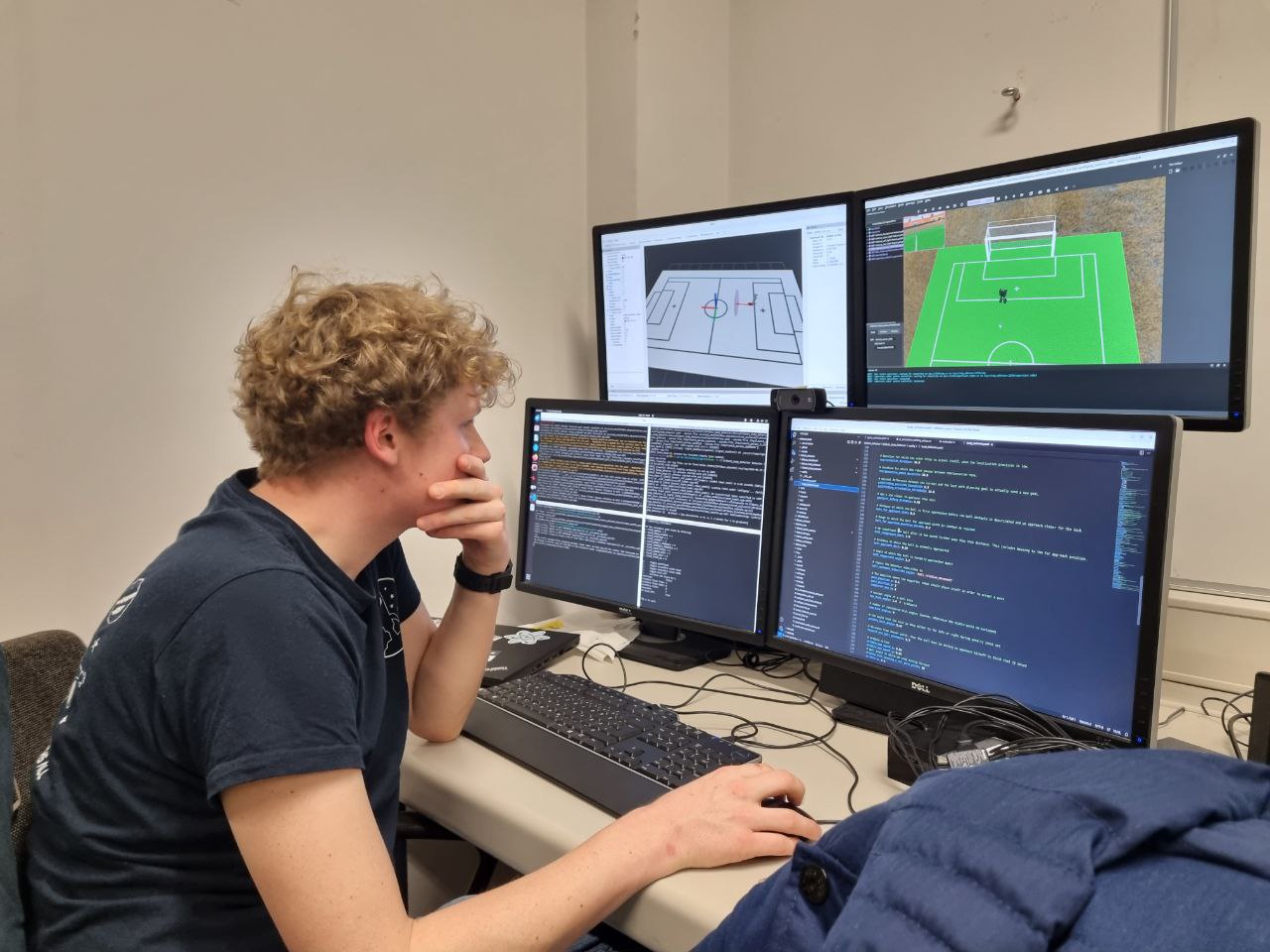
Zum Ende der Woche durften die Schüler in Simulation mit unseren großen Wettkampfrobotern arbeiten und schafften es auch dort zum Ball zu gelangen und damit Tore zu schießen. Zudem wurden Viedoaufnahmen für die abschließende Projektvorstellung hergestellt.
Die Woche hat sowohl den Schülern als auch den betreuenden Mitgliedern in unserer AG sehr viel Spaß gemacht. Die Schüler meldeten auch zurück, dass sie gern noch mehr Zeit gehabt hätten, um mehr in der Projektarbeit zu schaffen. Durch den Karfreitag war das Schnupperstudium um einen Tag verkürzt gewesen. Wir konnten auch einzelnen dabei helfen, herauszufinden, dass Informatik ihnen Spaß bringt und ein Teilnehmer wollte am liebsten gleich anfangen zu studieren. Wir werden auf jeden Fall nächstes Jahr wieder dabei sein.
Bis dahin steht dann diesen Monat auch die German Open an (GO), wo wir in Kassel gegen andere Teams antreten werden.
Von Freitag den 15.03 bis zum 22.03.24 hatten wir unsere Integrationswoche. Ziel dieser Woche ist es, möglichst viele Mitglieder in dieser Zeit im Labor zu haben und zu sehen, wie die einzelnen Komponenten eines Roboters miteinander interagieren. Für dieses Jahr haben wir uns vorgenommen, unser Laufen zu verbessern und etwas an unserer Hardware zu arbeiten. Mit einigen Snacks haben wir uns dann die acht Tage im Labor getroffen und gemeinsam viel erreicht.
Am Ende der Woche konnten wir sehr zuverlässig Laufen und sind dadurch erfolgreich ins Feld eingelaufen und haben den Ball in Richtung des Tores gedribbelt. Außerdem ist auch unser „Teaching Mode“ fertig geworden, der das Positionieren des Roboters durch Knopfdruck möglich macht. Dies wurde dann auch für eine kleine Fotosession benutzt. Wir haben unsere Lokalisierung und extrinsische Kalibrierung verbessert und ein paar Sensorprobleme mit unseren Fußandruck- und Lagesensoren behoben, was uns weitere Möglichkeiten eröffnet, unser Laufen zu verbessern. Wir haben auch ein Problem bei den Zeitstempeln im Kameratreiber gefunden und gelöst. Dadurch wissen wir jetzt sehr genau wo wir hingucken, selbst wenn man den Roboter gut durchschüttelt.
Amy nach dem EinlaufenRoboter mit Visualisierung der Lokalisierung
Zudem wurde auch an Stellen gearbeitet, die oft an der Hardware kaputt gehen. So wurde ein neues Case für den Computer des Roboters konzipiert, was die Befestigung verbessert. Darüber hinaus haben wir eine allgemeine Wartung unserer Roboter durchgeführt, was zum Beispiel das Laufen stabiler gemacht hat.
Am Ende gehen wir alle sehr zufrieden aus der Integration Week.
Im November sind die Bit-Bots zum KI-Fachtag an der VHS Stuttgart eingeladen worden, einen Vortrag zu halten und einen Workshop zu leiten. Also machten wir (Flo, Timon, Jan-Niklas und Lea) uns am Mittwoch, dem 29.11.2023, sehr früh auf den Weg nach Stuttgart. Um 7 Uhr fanden wir uns alle am Hamburger Hauptbahnhof zusammen. Eigentlich hätten wir gern einen Zug später genommen (den hatten wir auch gebucht), aber den hat die Bahn schon im Vorfeld ausfallen lassen (so auch mit unserem Zug für den Rückweg).
Durch die frühe Uhrzeit verlief die Fahrt am Anfang sehr verschlafen und auch allgemein ziemlich ruhig. Das lag wahrscheinlich daran, dass uns bei der Reservierung nicht aufgefallen war, dass es sich um ein Ruhewagen handelte. Mit der Zeit verging dann die Müdigkeit und der Schnee, der überraschenderweise am Morgen in Hamburg noch da war und mit der Reise in den Süden weniger wurde.
Mit ca. einer halben Stunde Verspätung erreichten wir Stuttgart und waren schon inmitten einer Attraktion: Stuttgart 21. Der neue Bahnhof ist zwar noch nicht fertiggestellt, aber auf dem ca. zehnminütigen Weg aus der Baustelle, wurde über die Fortschritte des Projekts aufgeklärt. Wir hatten im Vorfeld besprochen, erst zur Volkshochschule Stuttgart zu fahren, wo der Vortrag stattfinden würde, und dann am Abend in das für uns gebuchte Hotel einzuchecken.
An der Volkshochschule wurden wir freundlich begrüßt und in unseren Workshopraum geführt. Dort angekommen wurden Roboter ausgepackt, startklar gemacht und der spätere Vortrag noch ein letztes Mal geübt. Es dauerte dann auch nicht mehr lange, bis die ersten interessierten Besucher unseren Raum gefunden hatten, der dann zum Anfang des Workshops sehr gut besucht war.
Im Workshop haben wir dann erklärt, wie wir bestimmte Aufgaben lösen, Teile unseres Roboters zum Anfassen herumgegeben und auch unseren Roboter in Aktion gezeigt. Dafür haben wir ein Stück Rasen aufgebaut und unsere Roboter daraufgestellt. Gleichzeitig haben wir über einen Bildschirm gezeigt, was der Roboter gerade sieht, wie er Bälle und Linien erkennt und was er über sich selbst denkt. Anschließend haben wir auch das Laufen und selbstständige Aufstehen gezeigt.
Letzteres ist besonders gut angekommen, weshalb wir unseren Vortrag im großen Hörsaal danach mit einer Live-Demonstration angefangen haben. Anschließend haben wir erläutert, was der RoboCup ist und wie wir künstliche Intelligenz in unserer Software benutzen. Der Vortrag ist unter folgendem Link auch auf YouTube zu finden: https://www.youtube.com/watch?v=8aAUJXZS0xE
Nach dem Vortrag haben wir uns noch ein wenig mit unserer Ansprechpartnerin Monika Kurz ausgetauscht. Der offizielle Teil war nun vorbei und wir machten uns auf die Suche nach etwas zu essen und haben durch Empfehlungen ein nettes Restaurant gefunden. Gut gestärkt waren wir danach bereit, den Weg ins Hotel auf uns zu nehmen, der gar nicht mal so weit war. Im Zimmer angekommen, war es schon recht spät, sodass wir relativ bald auch alle schlafen gingen.
Am nächsten Tag, der mit einem leckeren Frühstück begann, war noch etwas Zeit, um Stuttgart ein wenig zu erkunden, bevor wir am frühen Nachmittag wieder zurückfahren würden. Dabei sind wir über Weihnachtsmärkte in der Innenstadt geschlendert, haben einen Paternoster im Rathaus entdeckt und sind zu einem kleinen See gelaufen, an dem es viele Enten gab. Schließlich haben wir uns von Monika verabschiedet, die sich sehr gefreut hat, dass mit unserem Vortrag und Workshop alles so gut geklappt hat.
Die Rückfahrt lief dann auch sehr entspannt, aber auch produktiv, wodurch die eine Stunde Verspätung nicht so sehr aufgefallen ist.
Im Viertelfinale am Samstag haben wir gegen das Team CIT-Brains aus Japan gespielt und leider verloren. Da die CIT-Brains im letzten Jahr Weltmeister wurden, haben wir damit schon gerechnet und waren nicht allzu enttäuscht. Trotzdem haben wir es geschafft, ein paar Tore zu verhindern, die in vorherigen Spielen gegen das leere Feld gefallen waren. Damit sind wir aus dem Wettbewerb ausgeschieden und das mit dem besten Ergebnis seit der Entstehung der Bit-Bots (den virtuellen Wettbewerb während Corona ausgenommen). Doch das letzte Spiel unserer Roboter auf diesem RoboCup war es dann doch nicht. Die Gastgeber und Weltmeister Rhoban haben uns kurzfristig zu einem Freundschaftsspiel eingeladen, welches von Arte begleitet und gefilmt wurde. Wir haben zugesagt und versucht alles möglichst schnell spielfertig zu machen. Im Spiel konnten unsere Roboter dann ihre aktuellen Fähigkeiten zeigen, wobei es einige kurzfristige Probleme gab. Das Spiel wurde dann auch nach der ersten Halbzeit abgebrochen, da Arte nicht länger Zeit hatte und beide Teams Material schonen wollten. Jetzt durften sich unsere Roboter wirklich etwas ausruhen und von den Spielen erholen.
Spannende Spiele wollten wir doch weiterhin sehen, weshalb die Idee aufkam, ein Freundschaftsspiel zwischen der Humanoid Liga und der Standard Platform Liga (kurz SPL) zu vereinbaren. In der SPL spielen alle Teams mit dem selbem Robotermodell einem „Nao“. Dies bringt ein paar andere Regeln und ein leicht anderes Spielfeld mit sich (sie spielen zum Beispiel auf relativ kurzem Rasen und mit einem einheitlichen Ball, während wir auf langem Kunstrasen und mit verschiedenfarbigen Bällen spielen können). Durch ihr humanoides Aussehen und ihre kompatible Größe war es jedoch trotzdem möglich, die beiden aktuellen Weltmeister beider Ligen (Rhoban und B-Human) gegeneinander spielen zu lassen. Gespannt haben wir beobachtet, wie die Naos (B-Human) auf dem Feld der Humanoid Liga gewannen.
Die restliche Zeit des RoboCups haben wir dann genutzt, um in Austausch mit anderen Teams zu treten, woraus ein spannendes kleines Experiment entstanden ist: Wir haben unsere Roboter mit den Beinen der NUBots ausgestattet und konnten damit tatsächlich laufen.
Damit war die Woche dann auch vorbei und somit unsere Zeit in der Messehalle. Also wurde alles eingepackt und in unsere Unterkunft gebracht. Am nächsten Tag ging es dann zu einem anderen Teil von Bordeaux: zur Universität. Hier fand das Symposium, die zum RoboCup gehörende wissenschaftliche Konferenz, statt. Neben den Vorträgen lasen wir Poster und stellten selbst auch ein Poster vor. Am Nachmittag waren wir dann noch zur Besichtigung des Labors von Rhoban eingeladen und haben den einen oder anderen spannenden Roboter gesehen. Mit dem Symposium war dann auch der RoboCup vorbei und die nächsten Tage wurden genutzt, um Bordeaux etwas mehr zu erkunden und zum Meer zu fahren.