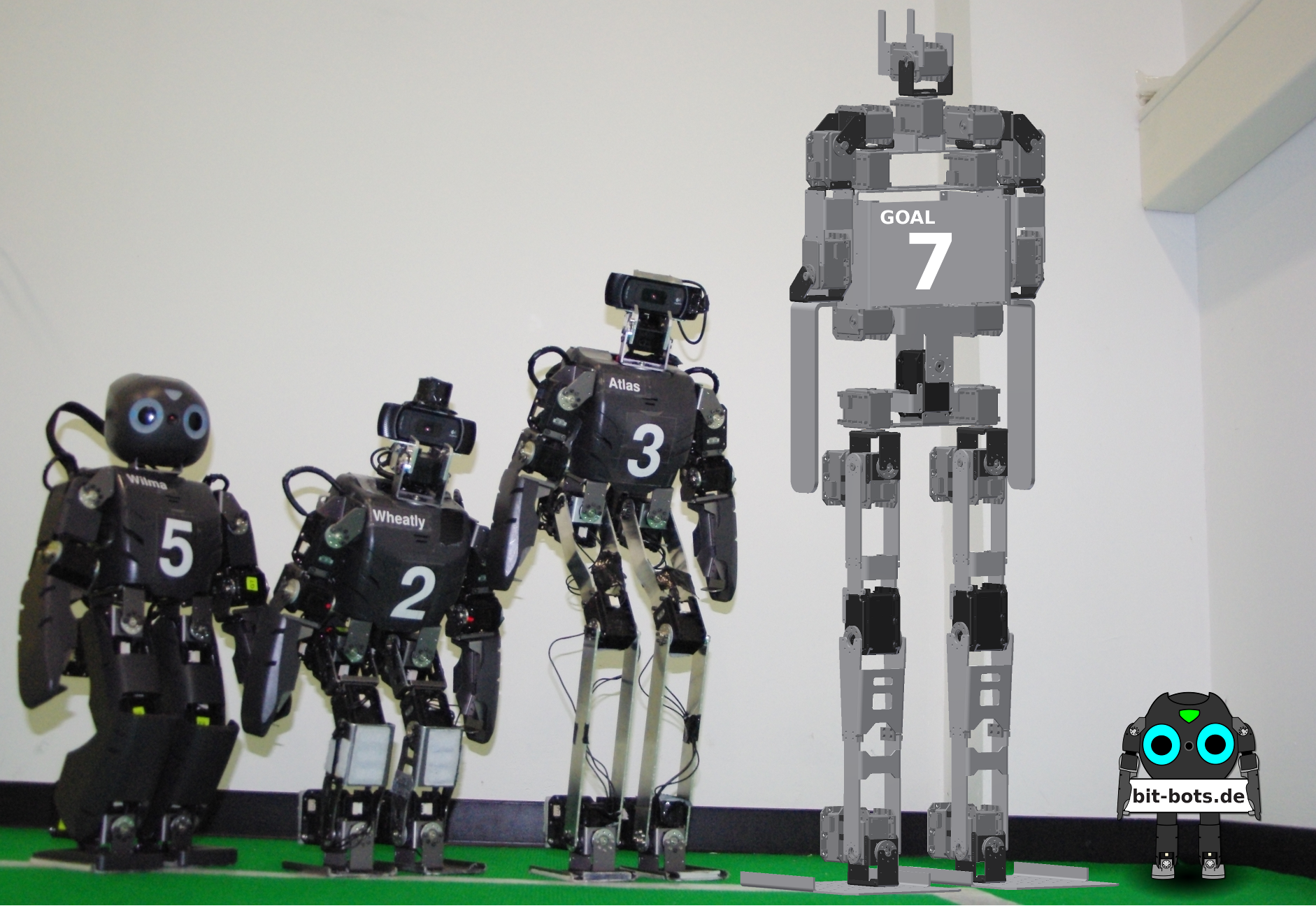
Wer aufmerksam unsere Artikel gelesen hat weiß schon, dass wir wiedermal einen neuen Roboter gebaut haben. Er heißt Hambot und ist sozusagen die zweite Version von GOAL, welchen wir letztes Jahr mit nach Brasilien genommen hatten.
GOAL hatte leider Probleme beim Aufstehen, weil das Verhältnis von Motorstärke zu Gewicht zu schlecht war. Aber wir haben letztes Jahr während der Entwicklung viel über CAD und Mechanik in der Robotik gelernt. Deshalb wollten wir diese Saison diese Idee in einer neuen Version fortführen und das haben wir auch getan.
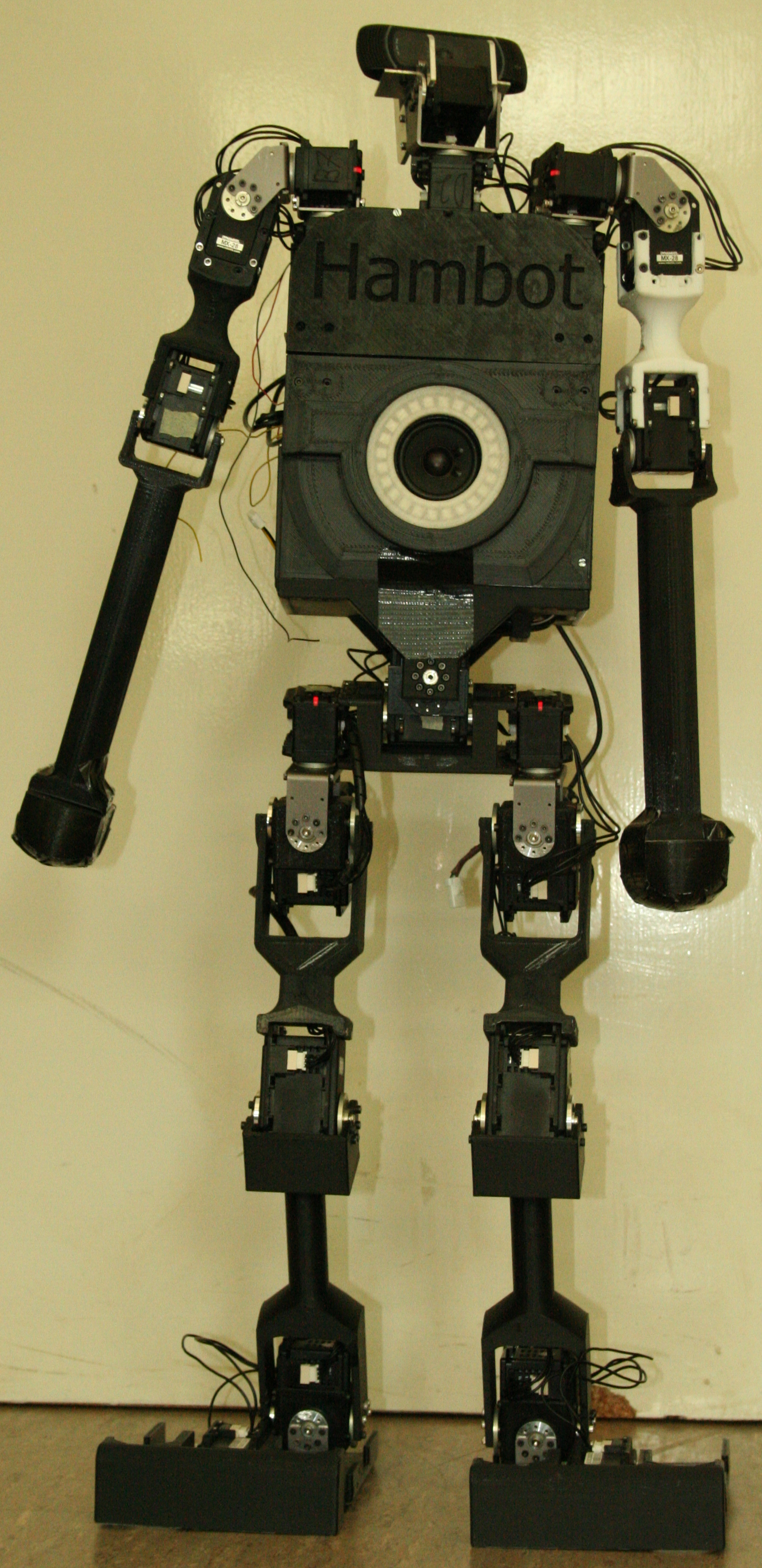
Die größte Änderung, die auch optisch direkt 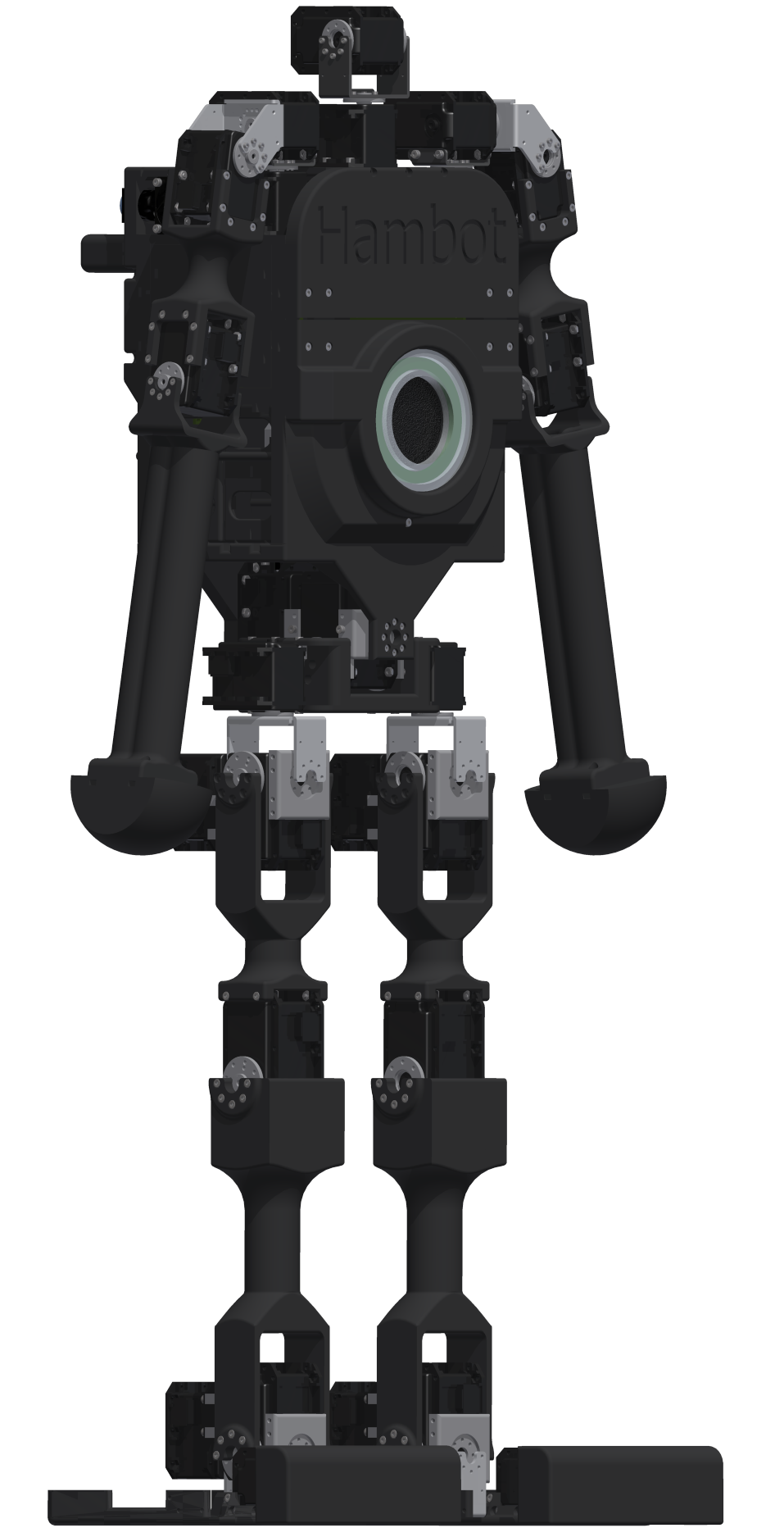 auffällt ist, dass wir Hambot fast vollständig im 3D Druckverfahren hergestellt haben. Dies hat für uns enorme Vorteile, da wir unsere Teile direkt im Raum neben unserem Labor herstellen können. Dieses sogenannte „Rapid Prototyping“ ermöglicht es von einem Bauteil an einem Tag mehrere Versionen herzustellen. Bei den Metallteilen mussten wir jedes Mal Tage bis Wochen warten bis wir das Teil in der Hand hatten. Außerdem ist das Plastik leichter als Aluminium und günstiger. Aber der größte Vorteil ist eindeutig, dass wir damit wesentlich mehr Designmöglichkeiten haben. Während wir bei den Aluminiumstücken nur Teile mit 90° Winkeln produzieren konnten, gibt es beim 3D Druck so gut wie keine Beschränkungen. Dies ermöglicht auch wesentlich menschlichähnlichere Formen.
auffällt ist, dass wir Hambot fast vollständig im 3D Druckverfahren hergestellt haben. Dies hat für uns enorme Vorteile, da wir unsere Teile direkt im Raum neben unserem Labor herstellen können. Dieses sogenannte „Rapid Prototyping“ ermöglicht es von einem Bauteil an einem Tag mehrere Versionen herzustellen. Bei den Metallteilen mussten wir jedes Mal Tage bis Wochen warten bis wir das Teil in der Hand hatten. Außerdem ist das Plastik leichter als Aluminium und günstiger. Aber der größte Vorteil ist eindeutig, dass wir damit wesentlich mehr Designmöglichkeiten haben. Während wir bei den Aluminiumstücken nur Teile mit 90° Winkeln produzieren konnten, gibt es beim 3D Druck so gut wie keine Beschränkungen. Dies ermöglicht auch wesentlich menschlichähnlichere Formen.
Aber wir haben noch eine Menge mehr geändert. Es gibt wesentlich verbesserte Interaktionsmöglichkeiten mit dem Roboter durch beleuchtete Buttons und einen LCD Touchdisplay auf dem Rücken. Wir haben auch eine ringförmige Anzeige mit RGB-LEDs eingebaut und einen extra-Chip zur Sprachsynthese verbaut, damit wir besser als bei der bisherigen Softwarelösung verstehen, was unsere Roboter uns erzählen möchten.
 Etwas sehr neues für uns war die Entwicklung der Elektronik. Aber dazu in einem späteren Artikel mehr.
Etwas sehr neues für uns war die Entwicklung der Elektronik. Aber dazu in einem späteren Artikel mehr.
Zum Glück ist es uns letzte Woche noch gelungen die letzten Teile vom Hambot fertig zu drucken und die Elektronik provisorisch zu verkabeln, denn heute fliegt er in den Iran um zum ersten mal Wettbewerbsluft zu schnuppern. Wir sind gespannt!
Neben unserem neuen Roboter gibt es auch noch zu feiern, dass wir letzte Woche unser erstes Paper für das RoboCup Symposium eingereicht haben. Auch dazu später mehr.
Es ist also ein ereignisreicher Start in die neue Saison. Mehr zu dem Thema Saisonstart findet ihr auch beim
Substanzmagazin, welches uns mal wieder besucht hat um die Atmosphäre im Labor kurz vor einem Turnier einzufangen.
Sowohl Elektronik als auch Druckmodelle findet ihr auf unserer Github Seite, auf der wir auch in Zukunft weiterhin unsere Soft- und Hardware quelloffen (Open Source) veröffentlichen werden.



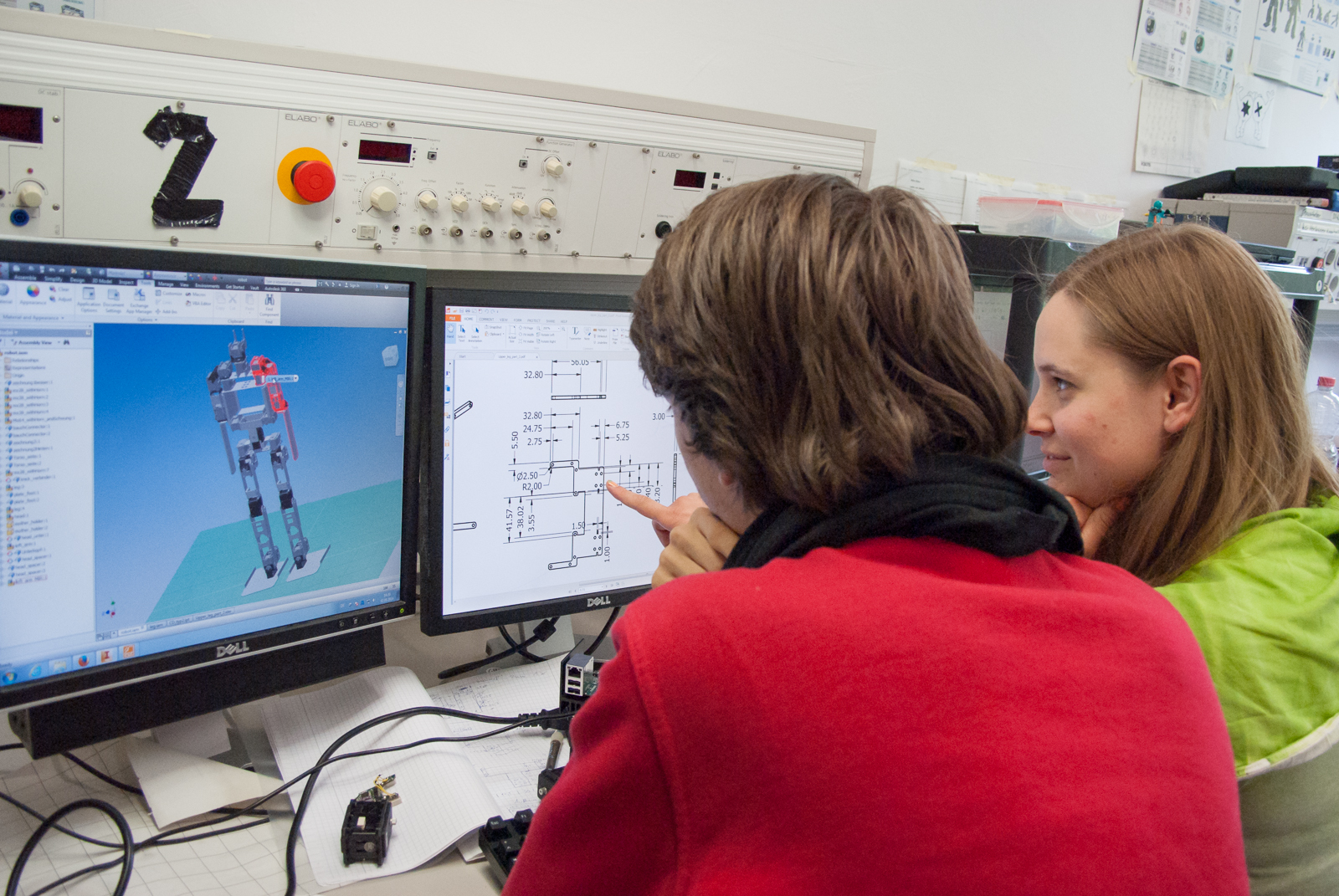 hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.
hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.