In China day four slowly got to its end, which means it is time for yesterday’s report.
In the morning we were having our breakfast, still being jet-lagged. Afterwards we went to the competition hall. Since we already knew our hard- and software problems, we could start fixing them right away. Many of us spent their time on the soccer field to be able to test the developments directly. At noon some of us went to a nearby shopping center to have lunch. There were many small food stands with freshly made Chinese food. Many dishes were surprisingly spicy, but altogether very delicious.
When we came back to the hall some of us had organized a large ceramic tile to make smaller tiles out of it, which can be mounted below the feet of Hambot. This should move the center of mass to the bottom to improve Hambot’s stability. But how to cut to equally sized squares out of a ceramic tile without proper tools? The helpful volunteers organized a buzz saw for us, but this one was only suitable for wood. It was not able to cut hard ceramic. So we had no other chance than trying to break it along a sharp edge. It worked amazingly well, but put us into the focus of the people standing nearby.

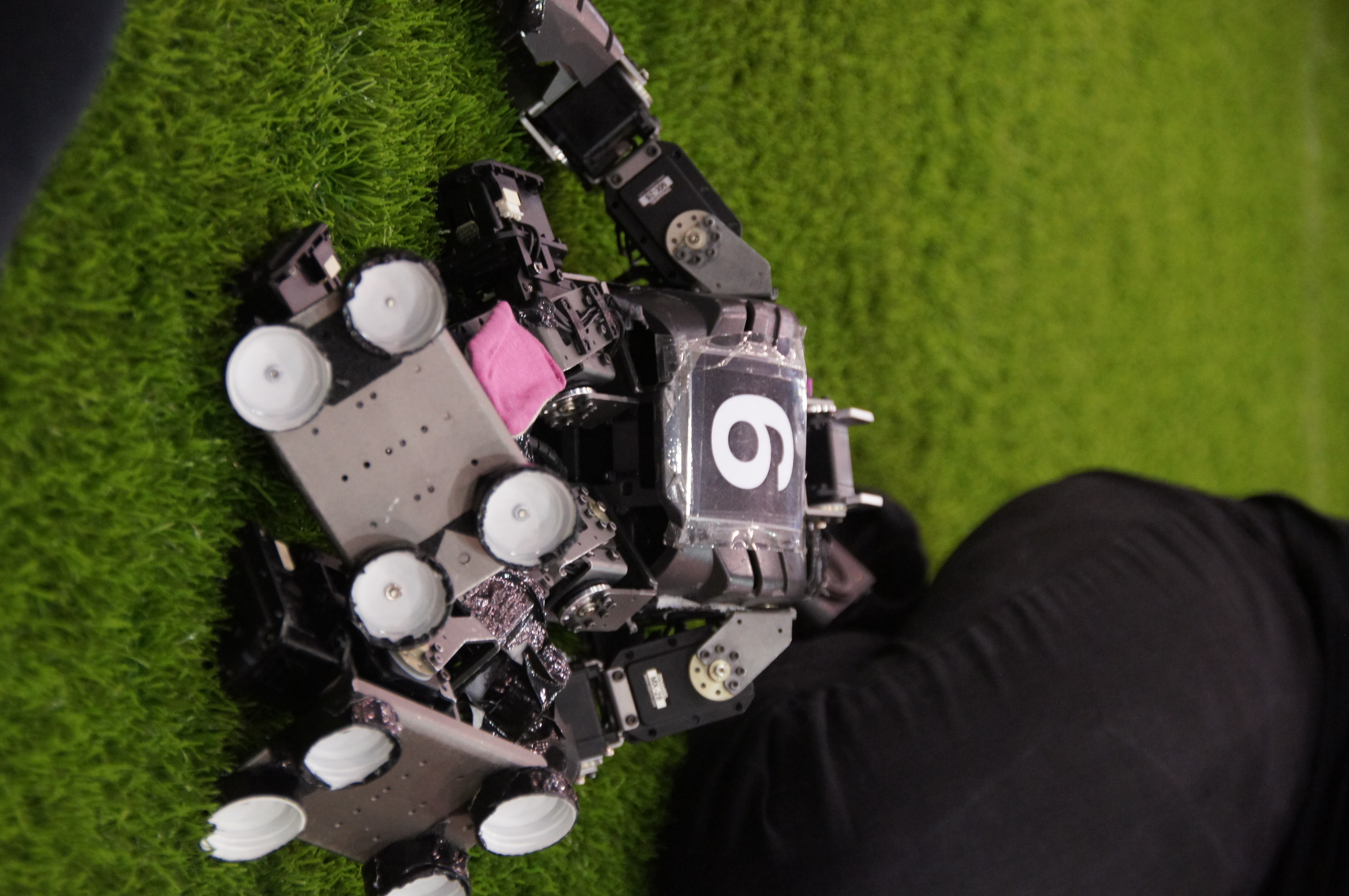
For the Darwins, the problems at walking could also only be solved by modifying the hardware. Since we already had tried many options for the feet at the German Open, we quickly found a solution. This time we used caps of bottles. We screw them below the feet, with the open side pointing to the floor. This does not affect the extent of the bottom of the feet, but really increases the stability on the artificial turf with its high blades. Now walking works much better.
As you can see, we never feel bored at Bit-Bots.