After a few speeches in which the value of developing new technologies was emphasized, the IranOpen officially began with some firework.
300 teams from Iran and teams from 11 countries will give their best in the next days.


After a few speeches in which the value of developing new technologies was emphasized, the IranOpen officially began with some firework.
300 teams from Iran and teams from 11 countries will give their best in the next days.
Since Sunday evening our team is in Teheran. We arrived with a short delay of about two hours at the airport. From there we went to our accommodation to get some sleep. We woke up and it felt like night due to the time shift.
The event site was a positive surprise – the area for the humanoid league was almost completely prepared in the morning of the first setup day.
While our team is preparing for the competition, you can look at some pictures of today morning:








The new year is in full swing (Gregorian calendar) or it just began
(Chinese calendar). In any case the new season finally started for us.
We just submitted our applications for the Iran Open (04.-08. April in
Tehran) and the World Cup in Leipzig (30.06.-05.07). For the latter we
obviously hope that we once again qualify, in particular since the
German Open won’t take place this year.
Next to the competitions we have events for the University on our
agenda such as the University Day on February 23th between noon and
3pm at the Department of Chemistry, the Girls day on April 28th as
well as projects with school classes.
Meetings within the team will also take place. At the end of the
Month we plan to meet to discuss our future goals as well as agree on
ways to improve our work within the group.
As a little teaser we have our current application video:

As you all have probably guessed: We are back in Hamburg since last Sunday. Our flight from Shanghai to Paris was delayed so we missed our flight to Hamburg and most of us had to stay the night in Paris and just returned the next afternoon.
The next day the University Lab “Fußballspielende Roboter” (Soccer playing robots) startet, which is organized by us, so we had no time to update you that we arrived home. The students in our lab are very productive as you can see in the picture.
As usual we were in the hall even before 9 am. But this time there were security checks, everybody was checked, and the backpacks were either scanned or searched per hand. This was done, because a high-level politician (a representative of the province) was expected to come
That day we mainly watched the matches. In our league, the final match was slow and dragged on. The CITBrains (Japan) played against the ZJUDancer (China). After normal time nobody had scored and just in the play-offs the CITBrains scored and became this year’s World Champions.
A lot more interesting was the final match of the middle size league, which was also watched by the representative. They played with driving, one meter high robots which are heavy and quick, and shoot nearly as strong as the average human. A chinese team (Water) and a team of the netherlands (Tech United Eindhoven) made it to the top.
In the first half the match was balanced with the same amount of scoring chances, but the chinese team scored three times and the dutch team once.
The second half was different, the dutch played offensive and scored a goal, but the chinese were more effective and used one of their few chances. So it ended 4:2 and the chinese team “Water” became winner of the league.
Even more exciting was the final of the adult size league, in which the robots are nearly as large as humans. They play one on one and it is the goal to dribble the ball around obstacles and shoot the ball in the goal where the other robot is goalkeeper.
This has to happen within a certain time and proceeds like the penalty shoot out (five alternating chances and play-off afterwards). A team from the USA (THORwIn) and a new team from the Iran (Baset) played. First the US-american team was in the lead with two goals, but after a few miss-kicks the iranian team catched up and the round of decision began.
After several goals in a try of the us-american robot the ball crossed the goalline just after the time had run out, but it counted as the robot had shot before the time was over. Afterwards it was turn of the iranian team, and it looked like the ball would go into the goal, but the robot touched an obstacle which counted as an unsuccessful trial.
After the finals there was a victory ceremony, and to conclude the evening many teams went to the inner city to a few bars.
Thursday they will be at the Symposium, listen to a lot of lectures and present Hambot. Afterwards will be a farewell-party.


Although we weren’t actively participating in the competition any more we arrived at 8:30 in the hall to attend to our referee duties. Thus we had a lot of time till the evening to exchange with other teams and two interesting events occurred.
Firstly, we wanted to how if and how the walking other teams had implemented worked on our robots. We sat together with the RoboPatriots who have relatively new and similar darwin-based robots to ours. After some difficulties and a few adaptations our robots were able to walk on the artificial turf with their software.
The second occurrence was, that we were invited by a member of the committee of the rescue league to let our robots walk on their uneven ground. Tamara was made volunteer and walked impressively well on gravel and bricks. The members of the rescue league were so excited that they offered to build a set and provide material for a Technical Challenge next year.
Also we promoted our Hambots and introduced a lot of teams to it in detail. Altogether a lot of visitors came to take pictures with Kuddel, Fiona, and other robots and many flyer and buttons were taken.
Furthermore mentionable is the FUmanoids making it into the quarter-final as the only german team where they lost against the ZJUDancer 0:1. In the semifinal the Rhoban Football Club from France were the only european team, and also lost against the ZJUDancer and will now play in the match for the third place.
On wednesday the small and grand final will take place.
Yesterday the first group phase ended. In the morning we played against the empty goal (the fourth “team” in the group as not all teams ha showed up). What would be easy in human soccer was still difficult for robots, as it is hard to decide which goal is the own and which the other. Our match ended without us scoring an own goal, but unfortunately, no goals were scored since we weren’t able to walk on the artificial turf well enough to reach the ball or kick it.
Now all matches of the group phase had ended without one goal so that a penalty shootout tok place to sequence the teams. Even here none of the teams scored, so the time it took each of the teams to get to the ball was measured. We were ranked third with 0.36 seconds difference to the second.
Or next match was against the fourth-ranked of another group. The Kudos from South Korea had similar strenghts and weaknesses as we have, so the match ended 0:0 after the normal time. Together we decided to leave out the play-off and start directly with the penalty shootout. As here was no goal scored either the time was measured again. We reached the ball quicker but touched it one time less and thus exited the championship.
That’s a pity, but now we can use our time here to swap ideas on soft- and hardware problems and can show the other teams our platform Hambot.
")
Today it got serious, after two set-up days in the hall the first group phase in our league began as the opening was still going on. The CIT Brains Kid, current World Cup holders, beat Robo-Erectus Junior 4:0 and demonstrated they’re in the running.

Three and a half hours later we started with our first match (against the Robopatriots). As reported, Kuddel got hurt in the goal. On the one side irritating, on the other side the part was “just” a prototype and he was operational after we had assembled the new, better version within an hour.
Just as the first match the second (against the Bold Hearts) ended 0:0. Tomorrow, one match remains to entering the second group phase. And maybe after Kuddel Cascade will have its first match.


After the first match we decided to not use Kuddel for the next match to take it easy on him, as some parts had been broken.So now we had time to concentrate on the Darwins and thoroughly tested the goalkeeper behaviour of Wheatly and tried to teach Tamara how to kick in a way that would move the ball. We were supported by the manufacturer of the Darwins, ROBOTIS, by half a pizza for each of us.
The match didn’t start well, we were playing with just two robots due to hardware defects which couldn’t be repaired in the short period of time. Wheatly was goalkeeper as planned and acted very well and threw himself down whenever he thought he was seeing a ball, it was just not the real ball. Latter hardly moved in the time, either Tamara and our opponents robots just moved around near the ball. Additionally, the motors in Tamaras knee were under different forces so that one side was put on stress more than the other. This caused her to give way and fall with increasing frequency.
Thus in the second half of the match Tamara became the goalkeeper and Wheatly field player, as well as Fiona who tried to help the two. We actually managed to kick the ball, moving it for about 10 cm. So this game also ended 0-0 and we hope to have more luck in the next game against the empty goal.
On the positive side, our banner is well visible for visitors and other teams, our flyers are taken along and we distribute our buttons to children whenever possible. We even passed a comment for the local television.
In China day four slowly got to its end, which means it is time for yesterday’s report.
In the morning we were having our breakfast, still being jet-lagged. Afterwards we went to the competition hall. Since we already knew our hard- and software problems, we could start fixing them right away. Many of us spent their time on the soccer field to be able to test the developments directly. At noon some of us went to a nearby shopping center to have lunch. There were many small food stands with freshly made Chinese food. Many dishes were surprisingly spicy, but altogether very delicious.
When we came back to the hall some of us had organized a large ceramic tile to make smaller tiles out of it, which can be mounted below the feet of Hambot. This should move the center of mass to the bottom to improve Hambot’s stability. But how to cut to equally sized squares out of a ceramic tile without proper tools? The helpful volunteers organized a buzz saw for us, but this one was only suitable for wood. It was not able to cut hard ceramic. So we had no other chance than trying to break it along a sharp edge. It worked amazingly well, but put us into the focus of the people standing nearby.

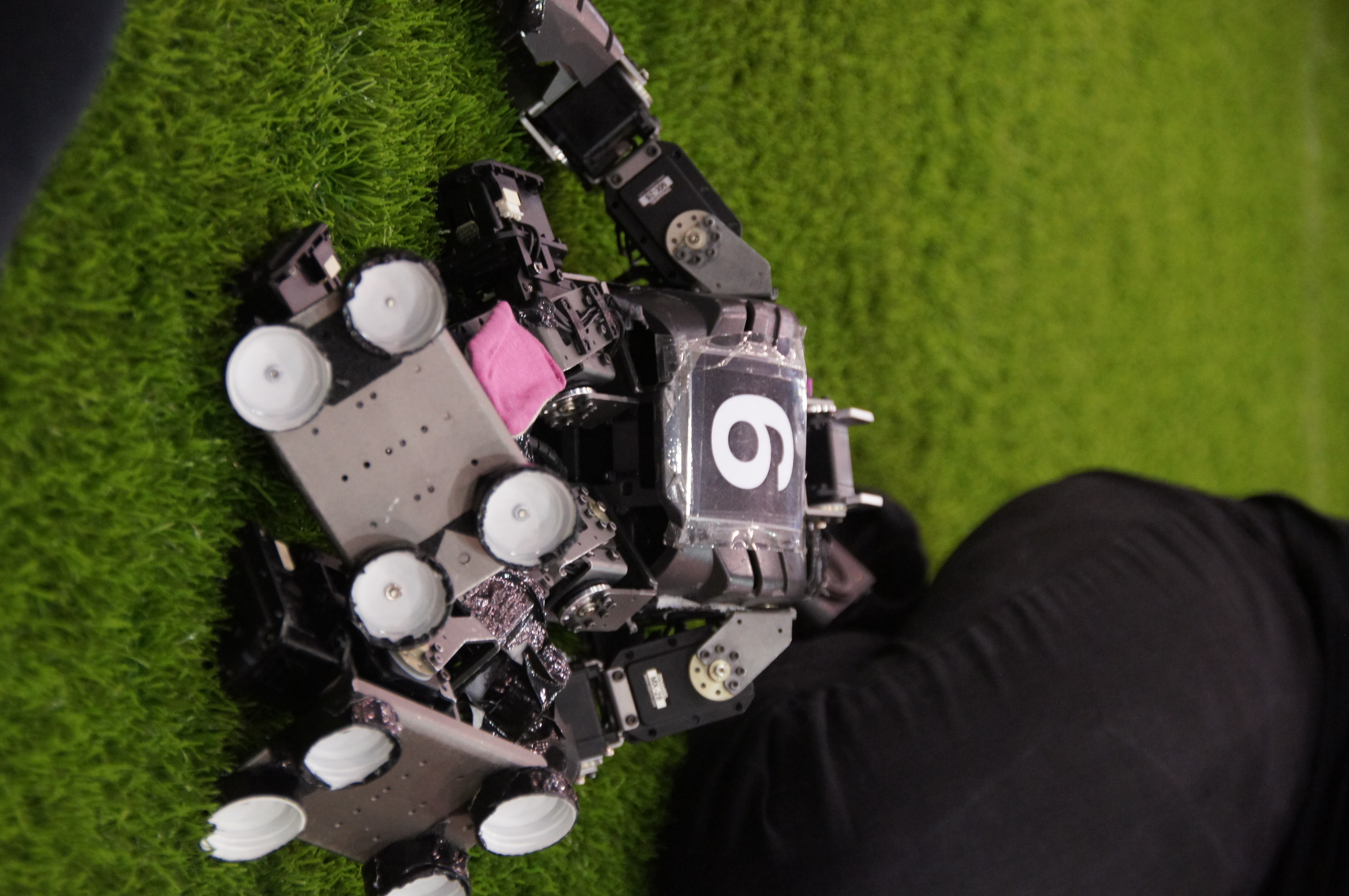
For the Darwins, the problems at walking could also only be solved by modifying the hardware. Since we already had tried many options for the feet at the German Open, we quickly found a solution. This time we used caps of bottles. We screw them below the feet, with the open side pointing to the floor. This does not affect the extent of the bottom of the feet, but really increases the stability on the artificial turf with its high blades. Now walking works much better.
As you can see, we never feel bored at Bit-Bots.