Von dem 15. bis zum 21. Juli fand der RoboCup 2024 in Eindhoven statt. Um ausreichend Vorbereitungszeit vor Ort zu haben, fuhren wir bereits am 12. Juni los. Auch dieses Jahr haben wir uns entschieden, für die Fahrt ein Auto zu mieten, das uns in Eindhoven begleitet und auch wieder heil zurückgebracht hat. Durch das Auto hatten wir viel Platz für alles Mögliche, und den Platz haben wir ziemlich gut ausgenutzt.

In Eindhoven wartete dann das Social Hub auf uns (unsere Bleibe für die kommenden Tage). Hier haben wir dann zusammen gekocht und gemeinsam unsere Roboter gecheckt, an ihnen geschraubt und kleine Softwareanpassungen gemacht.


Am Montag, dem 15.07.2024, konnten wir dann in die Halle … oder besser gesagt ins Zelt. Hierbei handelte es sich um ein recht großes Zelt mit festen Platten auf dem Boden, keinen Fenstern und einer sehr variierenden Temperatur. Es gab eine Klimaanlage, die bei kühleren Außentemperaturen zu sehr kühlte und gegen höhere Außentemperaturen nicht so gut ankam. In dem Zelt waren diverse Fußballfelder (4 für unsere Liga, eines für die Adult Size direkt nebenan), eine Roboterband, eine Bühne, die Logistics-, @Home- und @Work-Ligen und ein Merch-Shop.

Ziemlich bald machten wir uns an den Aufbau, richteten unseren Tisch ein, brachten Roboter aufs Feld und benutzten unseren neuen Flasher-Koffer zum Testen. Der Flasher-Koffer beinhaltet alles, um 4 Roboter mit Strom und einer Verbindung zu einem Computer zu versorgen. Er soll vor allem in der Vorbereitung für ein Spiel eingesetzt werden, um alle Roboter zu starten und mit der neuesten Software zu bespielen. Doch auch zum Testen bringt er alles Notwendige mit.



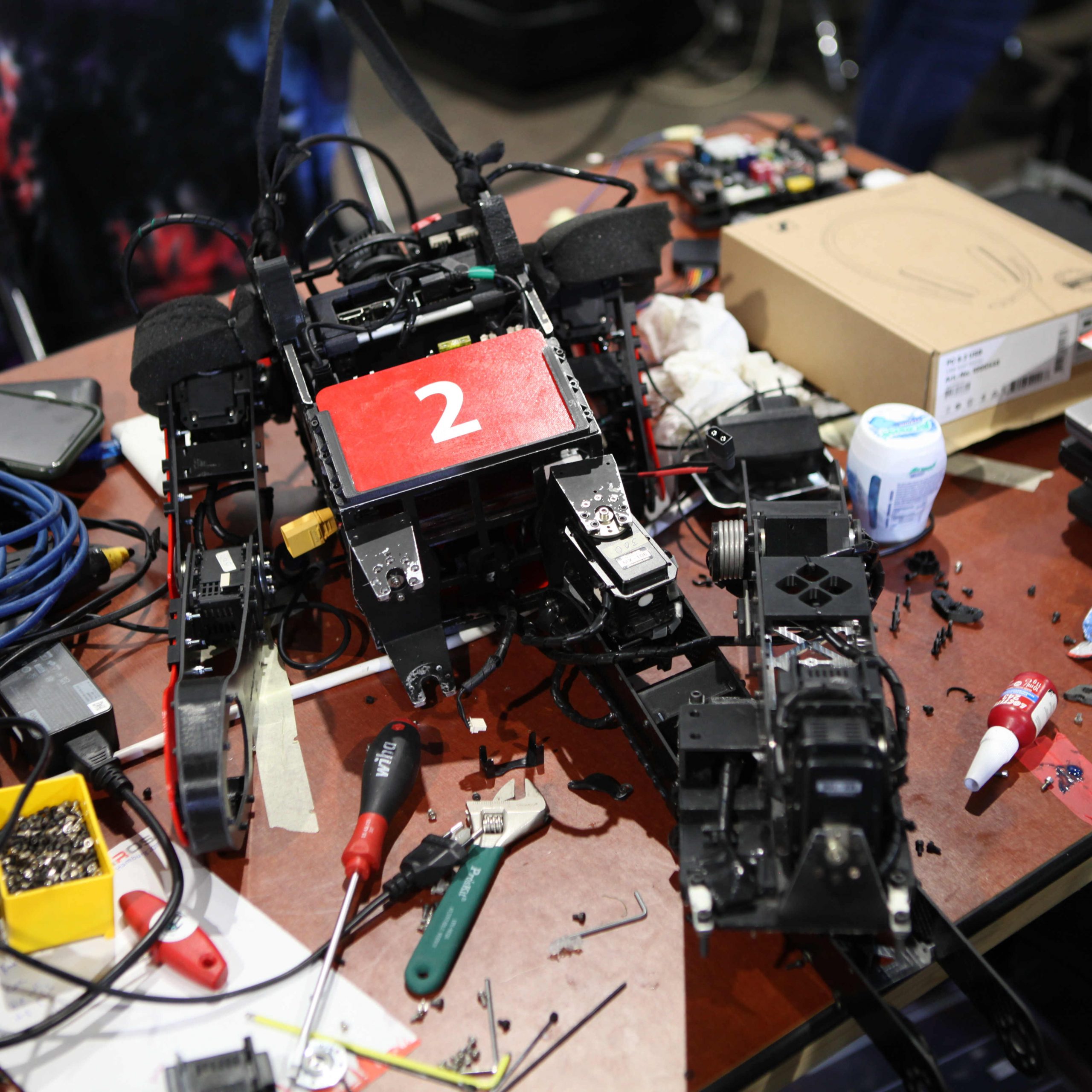
Generell haben wir während dieser WM sehr wenig Softwarearbeit gemacht, da wir sehr zufrieden mit unserem Softwarestand waren und mehr an den Robotern herumgeschraubt. Wir haben relativ schnell entschieden, die Oberschenkel Spacer, die die parallelen Beinplatten auseinanderhalten, gegen stabileren 3D-Druck auszutauschen. Zudem haben wir die Stollen von unseren Füßen abgeschraubt und stattdessen die Schrauben direkt als Stollen benutzt, weil das Kunstgras sehr rutschig war.


Am 18.07.2024 wurde es dann etwas ernster: Die Drop-in-Spiele begannen. In den Drop-in-Spielen stellt jedes Team nur einen Roboter, der dann mit Robotern von anderen Teams zusammen gegen eine ähnlich zusammengestellte Gruppe spielt. Generell gibt es in diesen Spielen wenig Teamstrategien, da die Roboter leider meist nicht miteinander kommunizieren. In diesen Spielen gibt es Punkte, wenn unser Roboter Tore erzielt. Zudem gibt es Punkte für Roboter, die im selben Team spielen und auf dem Feld stehen, wenn ein Roboter ein Tor erzielt. Am Ende der Drop-in-Spiele gab es 4 Teams, die Tore gemacht haben, und die Bit-Bots waren eins davon! Wir haben das erste Mal überhaupt ein Tor in einem Drop-in-Game geschossen. Doch es gab auch einen Rückschlag: Einer unserer Roboter (Amy) hat sich bei einem Sturz einen Schaden in der Elektronik zugezogen und konnte dadurch den restlichen RoboCup nicht mehr eingesetzt werden. Nun hatten wir also nur noch drei Roboter für die kommenden Spiele.


Nach den Drop-in-Spielen folgte die Gruppenphase. Hier waren wir zusammen in einer Gruppe mit den IT Androids, den NUbots und Ichiro. Unser erstes Spiel gegen die IT Androids gewannen wir mit 4:0. So viele Tore hatten wir bisher in einem realen Spiel noch nie geschossen. Gegen die NUbots hatten wir am Anfang der WM schon mal ein Freundschaftsspiel gewonnen. Daher war die Chance hoch, auch dieses Spiel zu gewinnen. Leider wurden wir auf dem Mittelkreis von den NUbots so unglücklich umgeworfen, dass wir uns verirrten. Eigentlich nutzt der Roboter die IMU beim Hinfallen, um dem entgegenzuwirken, aber das hat aus einer Kombination von Gründen nicht funktioniert, sodass unser Roboter ein Tor für das gegnerische Team erzielte. Deshalb beendeten wir dieses Spiel mit einem Gleichstand von 1:1. Das letzte Spiel in dieser Runde war eines der Spannendsten, da es viele Zweikämpfe und knappe Tore gab. Zudem hatten wir per Zufall einen komplett blauen Ball bekommen, auf den unsere Bilderkennung nicht so gut eingestellt war (normalerweise haben die Bälle immer etwas Weiß). Dies führte dazu, dass unsere Roboter den Ball aus der Entfernung nicht mehr sehen konnten und der Ball fast eine Halbzeit lang unberührt direkt vor dem gegnerischen Tor lag. Am Ende verloren wir das Spiel mit 0:2. Durch die Probleme mit der Ballsuche entschieden wir uns nach diesem Spiel, unser Ballsuchverhalten umzuschreiben und den Roboter an verschiedene Punkte auf dem Feld laufen zu lassen, damit er dort sucht, wenn er von seinem initialen Ort den Ball nicht erkennt.




Im Achtelfinale trafen wir dann auf die WF Wolves, das einzige andere deutsche Team innerhalb der Humanoid Kid Size Liga. Von diesem Team stammt auch unsere Roboterplattform ab. Daher sehen unsere Roboter sich ziemlich ähnlich. Die Wolves waren auch das eine Team gewesen, gegen das wir auf der German Open in Kassel etwas früher im Jahr mehrmals gespielt und auch gewonnen hatten. Daher kannten die Wolves uns auch schon recht gut und versuchten, uns vom Tore-Schießen abzuhalten. Dies sorgte für viele Stürze und dadurch auch viele Schäden am Roboter. Letztendlich gewannen wir diese Materialschlacht mit 2:0, wobei wir beide Male den Ball nah an das gegnerische Tor geschossen hatten, der Gegner dann jedoch den letzten Kick ins eigene Tor ausführte.
Für das Viertelfinale sollte Kura unser Gegner sein. Kura ist ein sehr starkes Team, das es letztendlich auch ins Finale geschafft hat. Wir haben uns darauf eingestellt, dass wir verlieren würden, haben aber trotzdem noch ein wenig an möglichen Verbesserungen gearbeitet: ein Torhüter-Verhalten, bei dem der Roboter in die Knie geht, um mehr Fläche abzudecken, schnelleres Laufen und längere Kicks. Doch mittlerweile war unsere Hardware schon ziemlich am Ende, und die langen Kicks des Gegners waren zu gut, sodass wir 0:6 verloren.


Damit sind wir im Viertelfinale des RoboCups ausgeschieden, was interessanterweise das gleiche Ergebnis ist, wie letztes Jahr in Bordeaux. Trotzdem haben wir uns deutlich verbessert: letztes Jahr war richtige Positionierung vor dem Ball und ein wenig Dribbeln das Beste, was unser Roboter geschafft hat, und ins Viertelfinale sind wir gekommen, weil wir den Ball beim Elfmeterschießen öfter berührt hatten. Dieses Jahr haben wir nicht nur den Ball gekickt, sondern auch mehrere Tore geschossen und konnten das Achtelfinale klar für uns entscheiden. Wir sind also von einem quasi leeren Feld zu einem Team im Mittelfeld aufgestiegen, das jetzt auch richtig mitspielen kann. Also ein sehr gelungener RoboCup für unser Team.
