Wir haben die Humanoid League Kid Size bei den RoboCup German Open 2025 gewonnen. Im Wettbewerb, der in Nürnberg stattfand, traten wir gegen die WF Wolves in einer Reihe von Spielen, die in einem entscheidenden 6:0-Sieg im Finale gipfelten, an.

Wettbewerbsüberblick
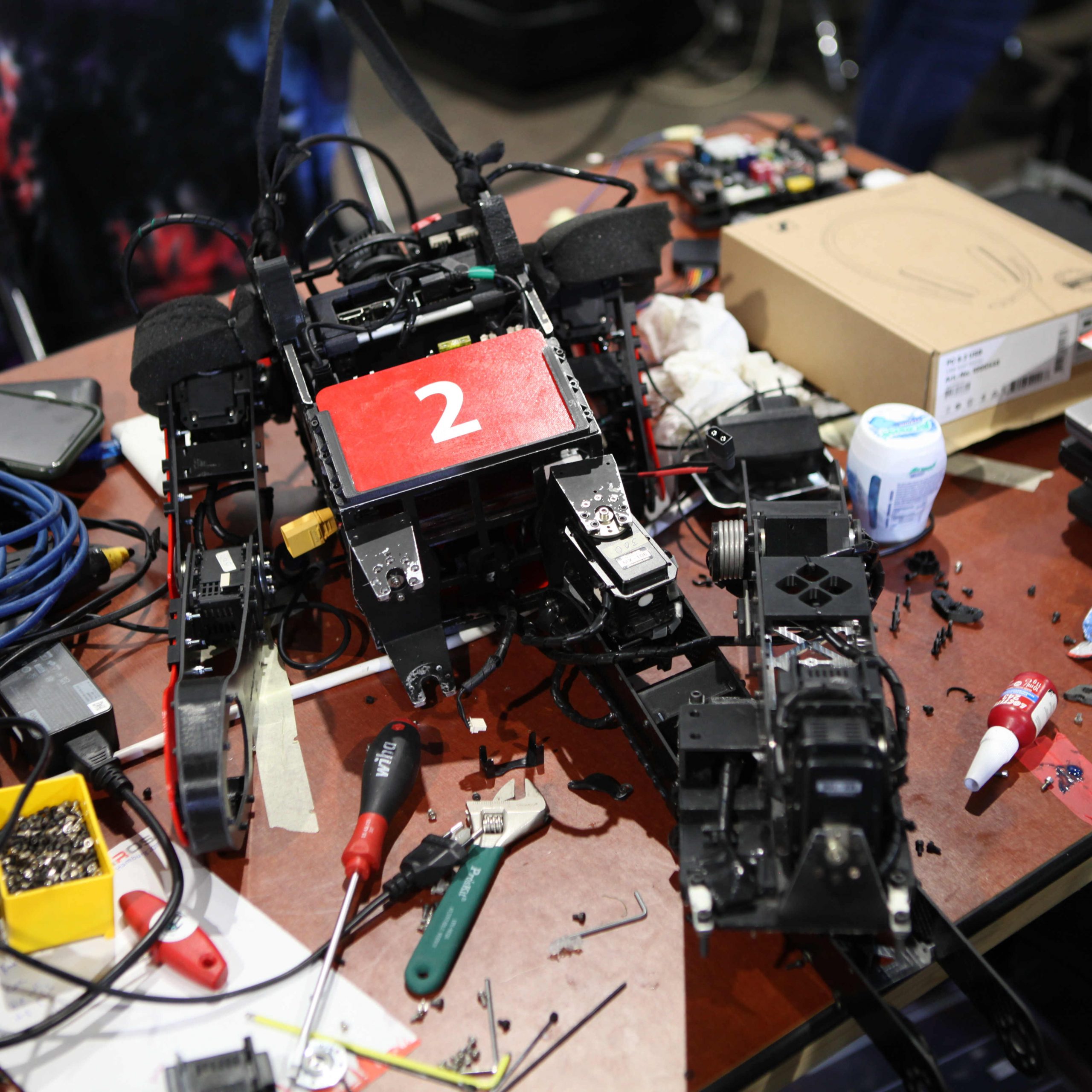
Wir starteten den Wettbewerb mit erheblichen Hardware-Herausforderungen und hatten nur 1-2 funktionsfähige Roboter. Durch sorgfältige Reparaturen und Wartung während des Events schafften wir es jedoch, bis zum Ende vier Roboter einsatzbereit zu haben, darunter Amy, die seit einer Kollision beim letzten RoboCup World Cup in Eindhoven außer Betrieb war.
Während des gesamten Wettbewerbs spielten wir mehrere Spiele gegen die WF Wolves. Obwohl nur das Finale zählte, gewannen wir alle unsere Spiele und führten konsequent mit mindestens drei Toren. Wir kassierten nur ein Gegentor während einer Strafstoßsituation, in der wir mit einem einzigen Roboter spielten, da die anderen gewartet werden mussten.
Software- und Hardware-Entwicklungen
Wir konzentrierten uns hauptsächlich auf Hardware-Reparaturen und -Wartung während des Wettbewerbs. Allerdings setzten wir auch einen neuen Pfadplanungsalgorithmus und einen tatsächlichen Einwurfmechanismus erstmals in einem Spiel ein. Beide Funktionen wurden von Studenten im Bit-Bots-Projekt 2024-25 entwickelt. Obwohl es keine Einwurfsituationen im Spiel gab, testeten wir die neuen Funktionen und waren mit der Gesamtleistung der Software zufrieden.

In einer unerwarteten Wendung hatten wir die Gelegenheit, unsere Software auf einem kommerziell verfügbaren Adult-Size-Roboter von Booster Robotics, dem Booster T1, zu testen. Dieser Roboter, der von einem chinesischen Team in der Adult-Size-Liga ausgeliehen wurde, war deutlich schneller und robuster als unsere eigenen Roboter. Wir passten unsere Software an, um auf dem Booster T1 zu laufen, mit Ausnahme der Motion, und nahmen an einem Testspiel teil, bei dem der Booster T1 der einzige autonome Roboter war und gegen ferngesteuerte Booster T1-Gegner spielte. Unsere Software lief gut, hielt die Lokalisierung aufrecht und blockierte den Ball effektiv.

Beim Einrichten unseres Software-Stacks auf dem Booster T1 stießen wir auf zwei Probleme. Zunächst dachte der Roboter, er bewege sich kaum, aber in Wirklichkeit bewegte er sich sehr viel. Bei der Untersuchung der Lokalisierungsdaten fanden wir einen Fehler „Bewegung abbrechen, da sich der Roboter unvernünftig viel bewegt“. Der Roboter war so schnell, dass das Lokalisierungssystem seine Bewegungen als fehlerhaft einstufte, obwohl sie korrekt waren. Zudem war unsere Gehgeschwindigkeit zunächst auf 1 m/s begrenzt, weil der Schieberegler in unserer Parameter-GUI keine höheren Geschwindigkeiten zuließ. Trotz dieser Herausforderungen lief unser Roboter vermutlich besser als die Menschen, die die anderen Roboter fernsteuerten, die ebenfalls erhebliche Steuerungsverzögerungen erfuhren.
Die Booster T1-Roboter gewannen auch die Adult-Size-Liga und spielten gegen das Team Sweaty. Die Teams der Standard Platform League (SPL) zeigten großes Interesse an den Booster-Robotern, da die Zukunft der NAO-Roboter ungewiss ist.
Reise und Unterkunft
Wir reisten mit dem Zug nach Nürnberg und nahmen alle unsere Roboter und Werkzeuge mit. Wir übernachteten in einem Airbnb, das günstig in der Nähe der U-Bahn gelegen war, was die An- und Abreise zum Wettbewerbsort einfach machte.
Deutsche Robotik-Konferenz (GRC)
Die RoboCup German Open 2025 beherbergten auch die erste Deutsche Robotik-Konferenz (GRC), auf der einer unserer Teammitglieder einen Vortrag hielt. Die Konferenzteilnehmer hatten die Gelegenheit, die German Open zu besuchen, was der Veranstaltung eine akademische Dimension verlieh.
Insgesamt war die RoboCup German Open 2025 ein unglaubliches Erlebnis für uns. Wir hatten viel Spaß und gewannen wertvolle Einblicke, insbesondere durch die Arbeit mit dem Booster T1. Es war aufregend zu sehen, dass unsere Software auf einer anderen Plattform mit sehr wenigen Änderungen lief, und wir haben viel aus dem Prozess gelernt. Wir freuen uns bereits auf die nächsten Wettbewerbe und können es kaum erwarten, das Gelernte anzuwenden.