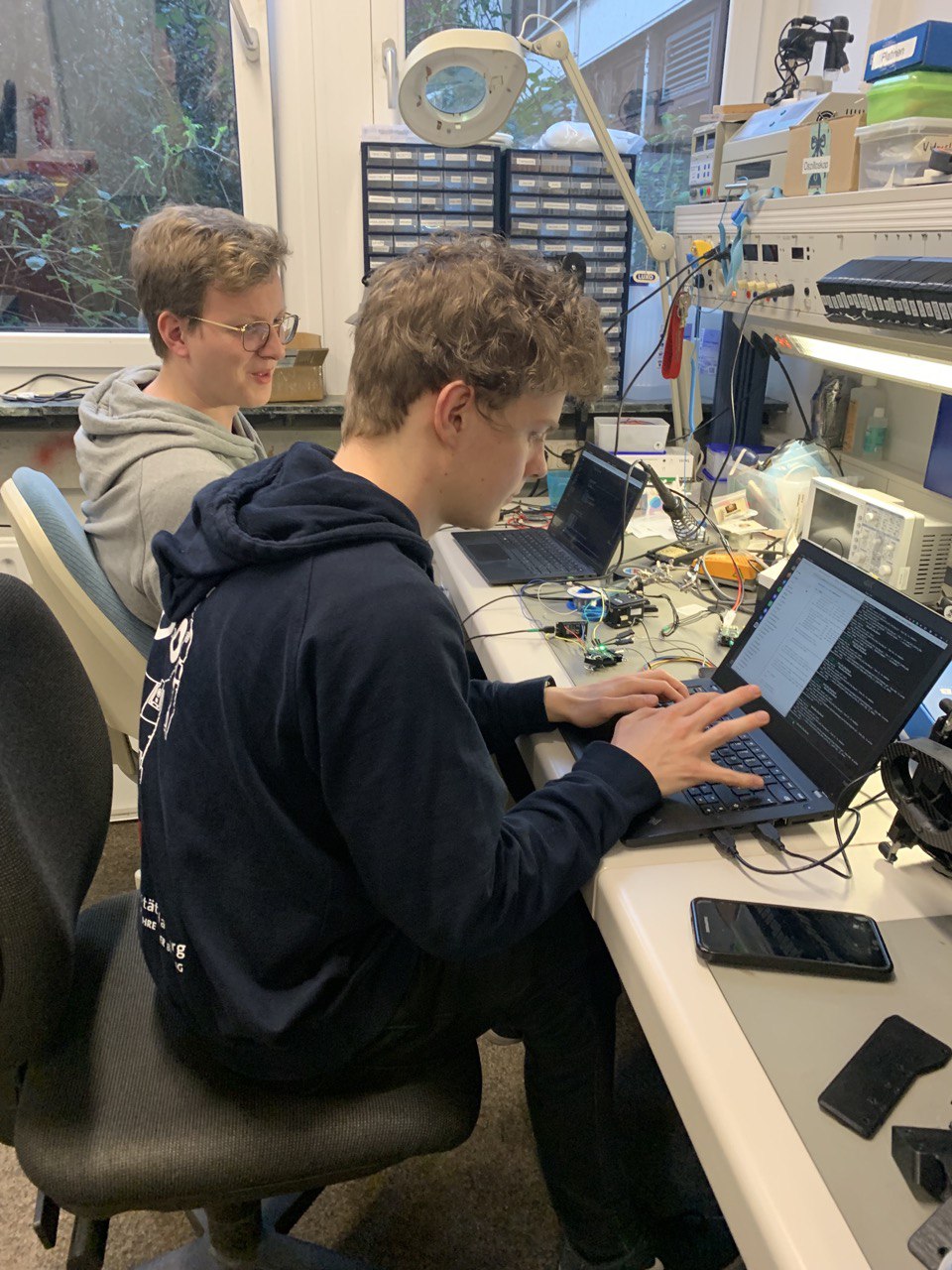
Von Freitag den 15.03 bis zum 22.03.24 hatten wir unsere Integrationswoche. Ziel dieser Woche ist es, möglichst viele Mitglieder in dieser Zeit im Labor zu haben und zu sehen, wie die einzelnen Komponenten eines Roboters miteinander interagieren. Für dieses Jahr haben wir uns vorgenommen, unser Laufen zu verbessern und etwas an unserer Hardware zu arbeiten. Mit einigen Snacks haben wir uns dann die acht Tage im Labor getroffen und gemeinsam viel erreicht.

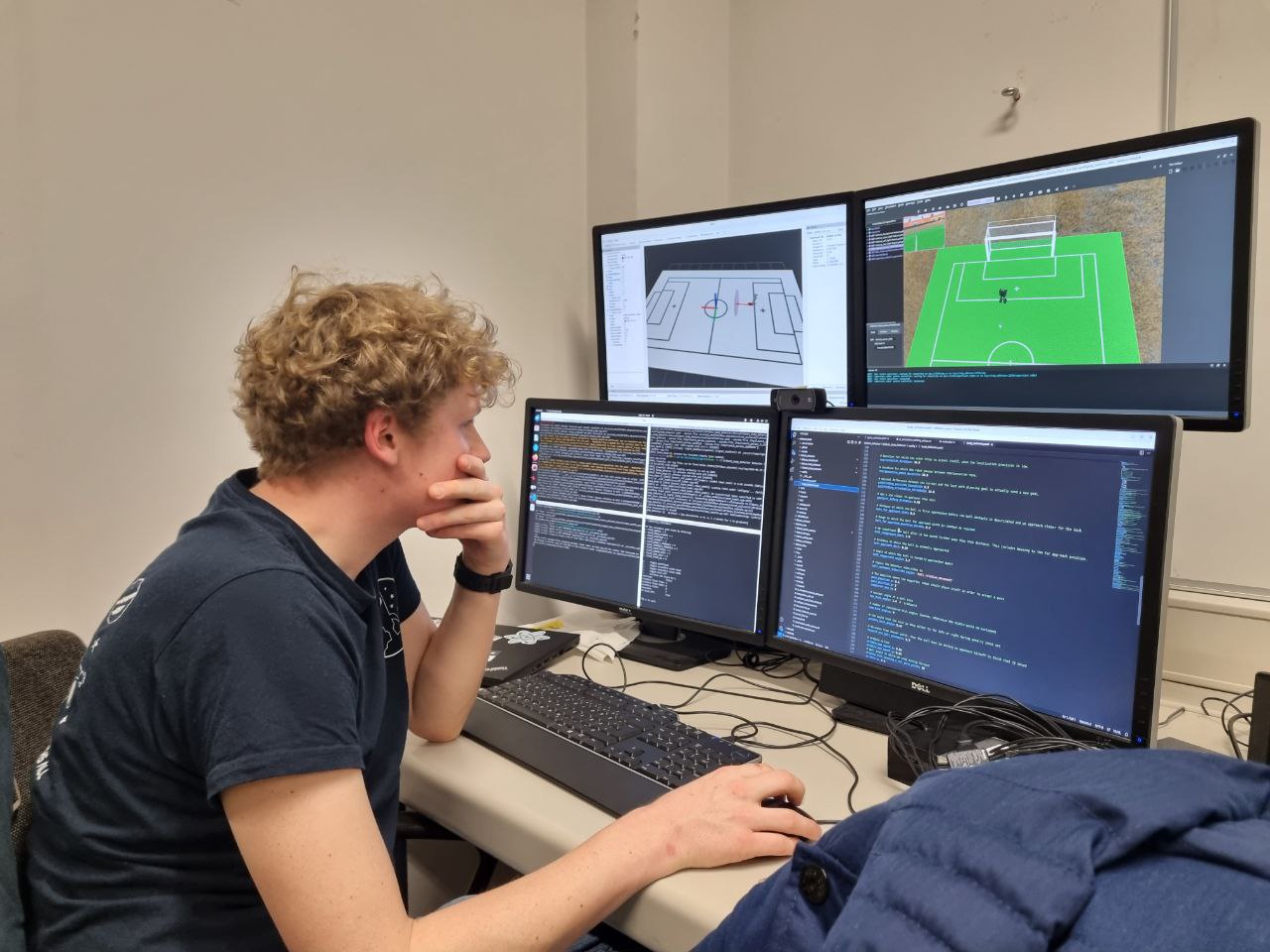
Am Ende der Woche konnten wir sehr zuverlässig Laufen und sind dadurch erfolgreich ins Feld eingelaufen und haben den Ball in Richtung des Tores gedribbelt. Außerdem ist auch unser „Teaching Mode“ fertig geworden, der das Positionieren des Roboters durch Knopfdruck möglich macht. Dies wurde dann auch für eine kleine Fotosession benutzt. Wir haben unsere Lokalisierung und extrinsische Kalibrierung verbessert und ein paar Sensorprobleme mit unseren Fußandruck- und Lagesensoren behoben, was uns weitere Möglichkeiten eröffnet, unser Laufen zu verbessern. Wir haben auch ein Problem bei den Zeitstempeln im Kameratreiber gefunden und gelöst. Dadurch wissen wir jetzt sehr genau wo wir hingucken, selbst wenn man den Roboter gut durchschüttelt.


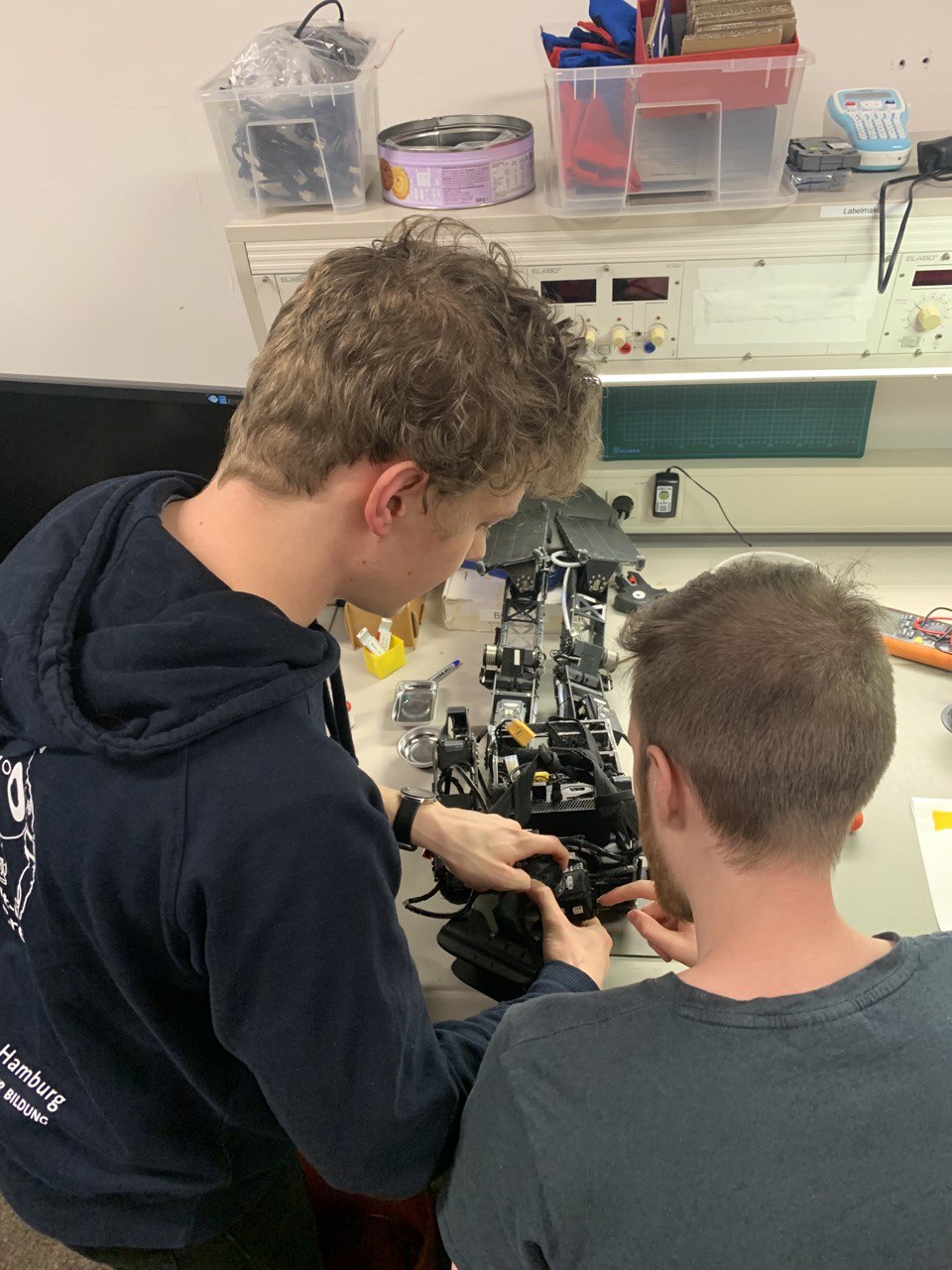
Zudem wurde auch an Stellen gearbeitet, die oft an der Hardware kaputt gehen. So wurde ein neues Case für den Computer des Roboters konzipiert, was die Befestigung verbessert. Darüber hinaus haben wir eine allgemeine Wartung unserer Roboter durchgeführt, was zum Beispiel das Laufen stabiler gemacht hat.

Am Ende gehen wir alle sehr zufrieden aus der Integration Week.