Nach pünktlichem Abflug folgte ein ereignisloser kurzer Flug nach Paris. Zwar hatten wir hier nur wenig Aufenthalt, aber da wir zügig durch die meisten Kontrollen durchkamen (mehr als zwei Grenzkontrolleure wären auch nicht schlecht bei so vielen Reisenden…), blieb noch die Möglichkeit zu einem kurzen Einkauf. Wir besorgten uns Schokolade und ein französisches Rätselheft als Zeitvertreib für den Transatlantikflug.
Für diesen sehr langen Aufenthalt an Bord war das Rätselheft alleine als Zeitvertreib nicht ausreichend. So wurde, wenn nicht gerade am Code gearbeitet wurde, das In-Flight-Entertainment-System oder die gereichten Decken und Kissen zum Schlafen genutzt. Die Qualität der Mahlzeiten war sehr gut, die jeweilige Menge ließ allerdings einige Mitglieder des Teams ungesättigt zurück. Besonders dem vegetarischen Essen schienen einige Kalorien zu fehlen, dafür wurde es aber auch deutlich vor den restlichen Essen gereicht. Sehr erfreut waren wir für Dennis, dass es mit dem glutenfreien Essen für ihn geklappt hat, trotz der Schwierigkeiten bei der Essensanmeldung.
Gegen 16 Uhr brasilianischer Zeit war es dann soweit: die ersten Ausläufer des südamerikanischen Kontinents tauchten unter dem Rumpf unseres Fliegers auf.

Kurz nach der Ankunft in Rio de Janeiro wurden wir an die lokalen Ereignisse der letzten Tage erinnert: bereits bei der Passkontrolle, wurde einigen Teammitgliedern zum Gewinn der FIFA WM gratuliert. Hinter der Passkontrolle erwartete uns dann Fuleco, das Maskottchen der FIFA WM. Natürlich nutzten wir die Gelegenheit zum Erinnerungsfoto.

Beim Flug nach João Pessoa handelte es sich um einen Nachtflug, sodass nicht nur unser Team, sondern auch ein Großteil der übrigen Passagiere nach Möglichkeit versuchte zu schlafen.
Pünktlich um 1:20 Uhr in der Nacht verließen wir das Flugzeug, holten unsere vollständig und heile angekommenen Koffer und trafen unsere Kontaktperson von der Transferagentur, die sich als sehr gut englischsprechend herausstellte. Völlig überraschend waren wir damit bereits um 3 Uhr am Hotel. Wir hatten mit mehr Verzögerungen und längerem Check-out gerechnet, womit es sich nicht gelohnt hätte ein Zimmer für den Tag zu nehmen. So machten wir das Beste draus, ließen unser Gepäck im Hotel und verbrachten die Zeit bis zum Sonnenaufgang gegen 5:30 Uhr am Strand gegenüber. Dabei machten wir eine erste kurze Besprechung, was wir in den nächsten Tagen tun müssen.

Als zwei von uns kurz beim Hotel vorbeischauten, um nach einer Toilette zu fragen, wurden wir davon überrascht, dass uns angeboten wurde gegen einen kleinen Aufpreis bereits zwei Zimmer zu beziehen und das Frühstückbuffet zu nutzen. Ein Angebot, das wir nicht ablehnen konnten.





























































 Schon lange wollten wir gerne eine Deckenkamera in unserem Feldraum haben. Allerdings wurde es immer weiter verschoben, da wir Dinge mit höherer Priorität zu erledigen hatten.
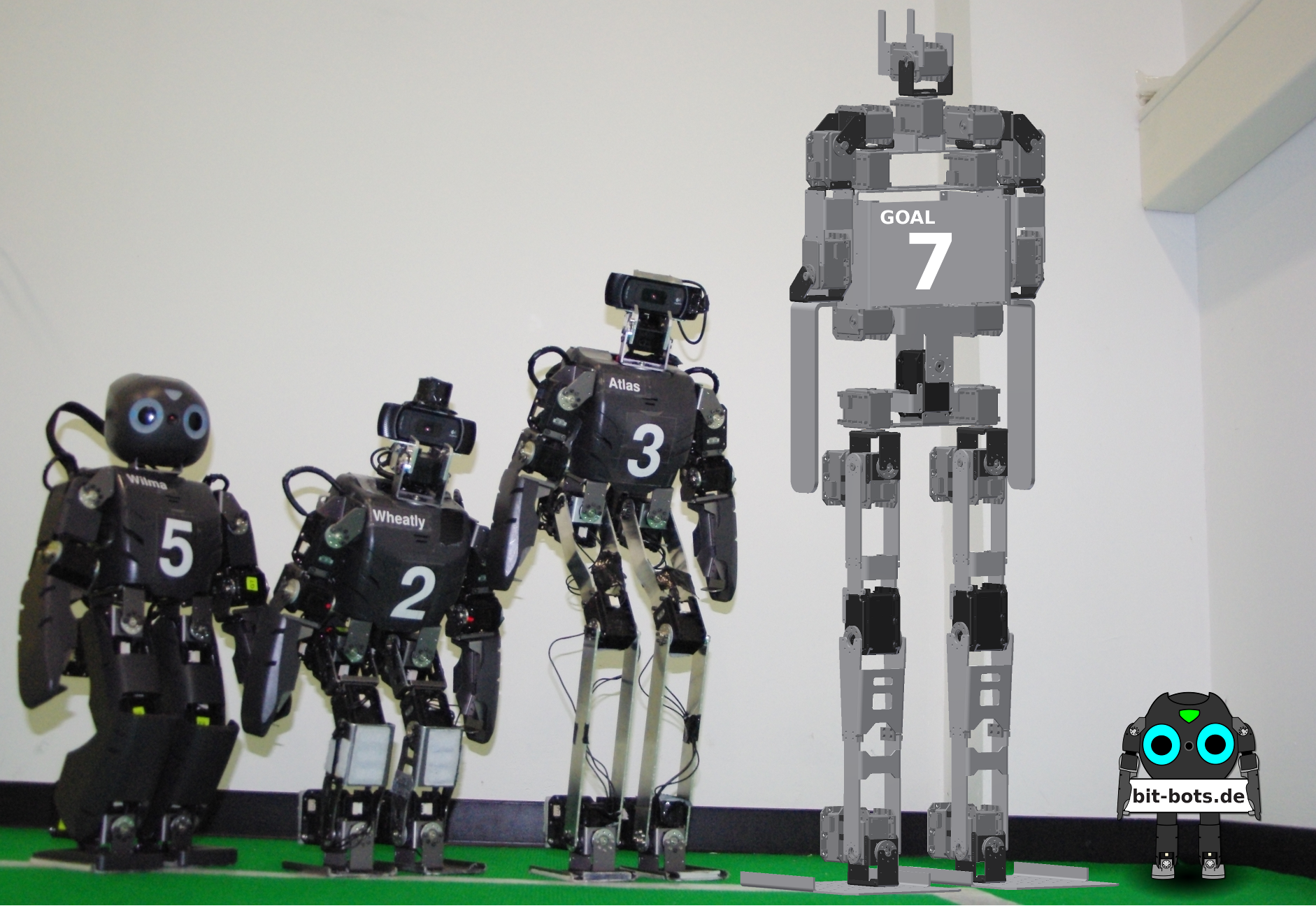
Schon lange wollten wir gerne eine Deckenkamera in unserem Feldraum haben. Allerdings wurde es immer weiter verschoben, da wir Dinge mit höherer Priorität zu erledigen hatten.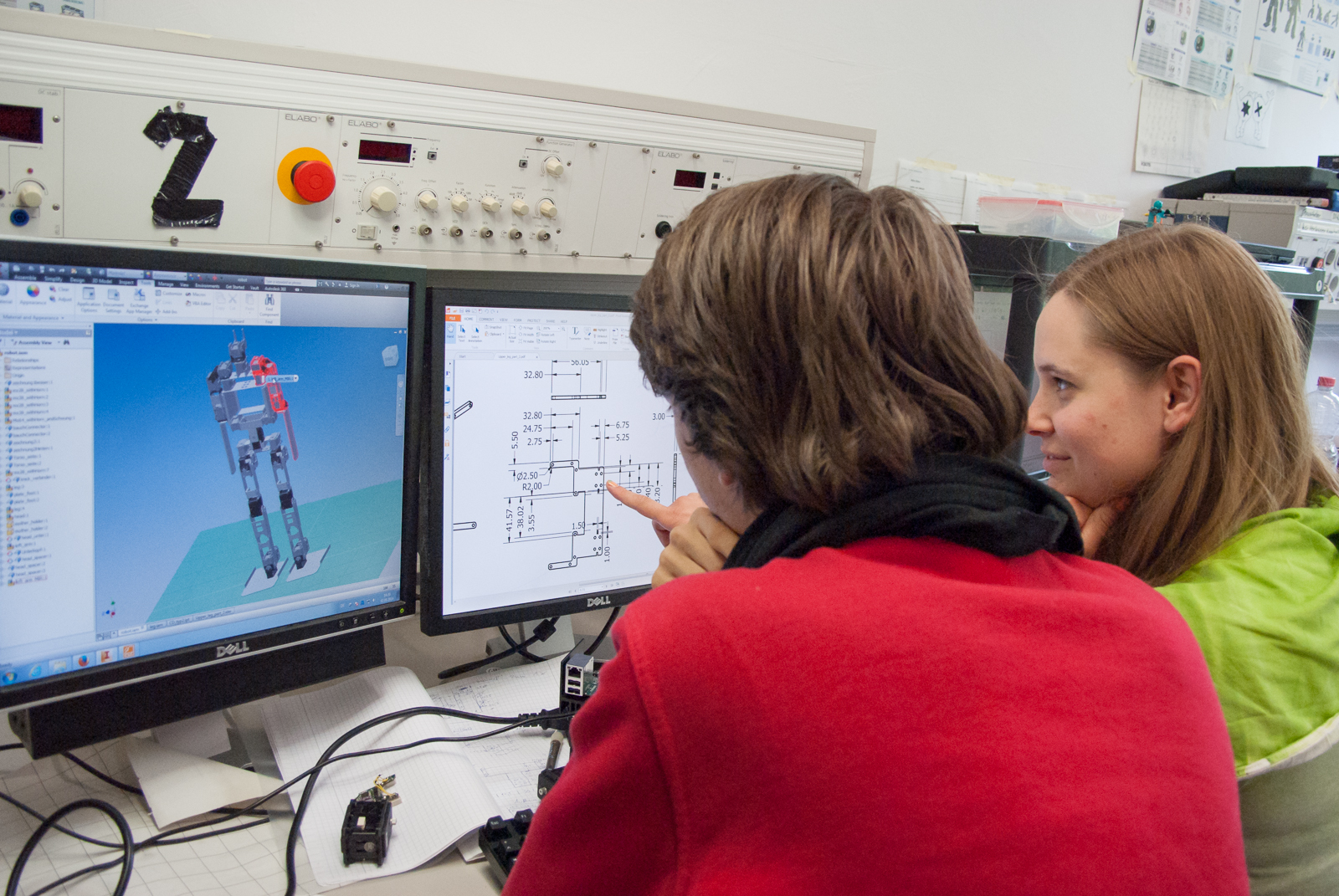 hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.
hr schon in unserem letzten Bericht gelesen habt, wollen wir, dass unsere Roboter wachsen, damit sie eine Chance gegen die neuen Riesen in unserer Liga haben. Deshalb haben wir in den letzten zwei Wochen unseren neuen Prototypen mit dem 3D CAD Programm Autodesk Inventor modelliert. Mit solchen 3D CAD Programmen lassen sich am Computer sehr schnell dreidimensionale Objekte erzeugen. In unserem Fall sind dies vor allem Aluminiumteile, die zuerst mit einer CNC-Fräse aus dem Metall geschnitten und dann gebogen werden. Um das zu erreichen machen wir zweidimensionale Skizzen in dem Programm aus denen dann die dreidimensionalen Körper erzeugt werden. Dann können noch Anpassungen angenommen werden, wie Bohrlöcher oder abgerundete Ecken. Zum Schluss errechnet Inventor daraus automatisch die nicht gebogenen Umrisse des Metalls die dann in die CNC-Fräse gehen.