Es ist kaum zu glauben, aber die WM in Japan ist schon wieder ein Jahr her und die Weltmeisterschaft in Montreal, Kanada, steht vor der Tür. Dieses Jahr ist der Zeitplan etwas ungewöhnlich: Am Samstag und Sonntag sind die Set-up Tage, die nicht für die Öffentlichkeit zugänglich sind; das eigentliche Turnier findet dann ab Montag statt.
Wie im letzten Jahr fand die Ankunft der Teammitglieder auch in diesem Jahr wieder gestaffelt statt: Jessica ist gestern bereits angereist und konnte den Tag nutzen die Stadt ein wenig zu erkunden. Der Rest des Teams ist dann heute nachgereist: Für Maike ging es bereits um 06:05 in Stockholm los, Judith, Jasper, Marc, Timon, Niklas und Daniel sind um 10:10 in Hamburg aufgebrochen. Mit ordentlich Verspätung ging es dann den größten Teil der Strecke (von Paris nach Montreal) gemeinsam weiter. Der Flug wurde genutzt, um ein bisschen an der Software zu arbeiten, neue Teams kennen zu lernen und Schlaf nach- oder vorzuholen. Der Flughafen in Montreal war dann fest in der Hand der RoboCupler: Nahezu zeitgleich sind Flieger aus Paris, Amsterdam und Frankfurt gelandet und haben beinahe alle europäischen RoboCup-Teams zeitgleich nach Kanada gebracht.
Bei der Reise vom Flughafen zur Unterkunft haben wir dann unsere erste Erfahrung mit der berühmten kanadischen Freundlichkeit gemacht. Die Menschen sind wirklich unglaublich hilfsbereit und zwar nicht nur, wenn man darum bittet, sondern ganz proaktiv. Andererseits geht hier auch alles seinen sehr geordneten Gang: Für die Shuttlebusse vom Flughafen gab es einen „Einweiser“, der genau bestimmte wie viele Menschen pro Bus mitfahren durften. Und das ging streng danach, wie viel Platz in den Gepäckfächern und wie viele Sitzplätze vorhanden waren. Was für ein Gegensatz zu Japan, wo Menschen dafür bezahlt werden, möglichst viele Fahrgäste auf einmal in einen Zug zu pressen!

View towards Convention Center and river
Wir haben uns dieses Mal eine Ferienwohnung etwas außerhalb der Innenstadt gemietet. Damit ist die Anreise zur Halle zwar länger, aber dafür sind wir alle gemeinsam untergebracht, können morgens in Ruhe frühstücken und abends gemeinsam kochen (wenn die Zeit bleibt) – und so viel und lange Nachts arbeiten, wie wir wollen! Bei der Ankunft an besagter Ferienwohnung war der Schrecken dann aber erst einmal groß: Der Zahlencode für die Tür funktionierte nicht und natürliche hatte niemand von uns eine kanadische SIM-Karte oder ein Auslandsdatenpaket. Zum Glück kam der Vermieter aber zufällig vorbei und so nahm das kurze Drama noch einen guten Ausgang. Der Abend wurde dann nur noch für eine kurze Einkaufstour und ein schnelles Abendessen genutzt und nun liegt der Großteil des Teams bereits in den Betten. Durchaus verständlich, nach deutscher Zeit ist es auch schon kurz nach 5 Uhr morgens.
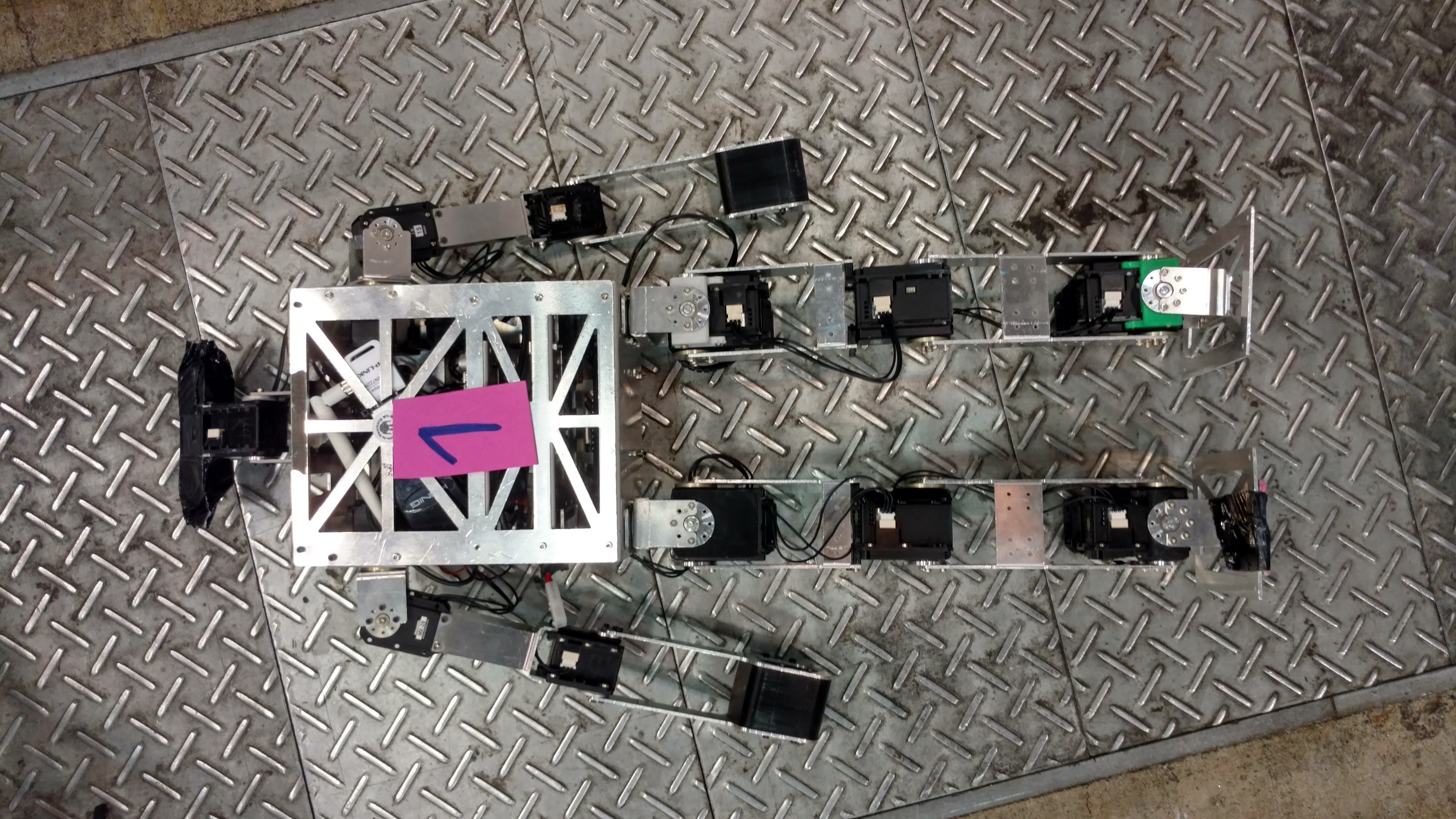
Morgen früh öffnet die Halle um 8 Uhr und natürlich wollen wir wie immer mit als erstes dort sein, um direkt loslegen zu können. Wir hoffen morgen Vormittag direkt Testbilder aufnehmen zu können, um die Vision zu trainieren. Außerdem muss das Walking auf dem lokalen Kunstrasen getestet und gegebenenfalls angepasst werden. Seit der letzten WM hat sich sowohl in der Hardware als auch in der Software einiges getan und die Motivation im Team ist so hoch wie lange nicht mehr. So freuen wir uns alle wahnsinnig darauf, dass der RoboCup 2018 morgen endlich beginnt!

Convention Center, Palais des congrès de Montréal Robocup 2018