Letztes Wochenende war die „Mock Competiton“, ein erster Testlauf für die echte Weltmeisterschaft. Anders als die regulären Wettbewerbe, werden dieses Jahr die Spiele alle simuliert werden. Wir waren aufgeregt, endlich unsere Software gegen echte Gegner ausprobieren zu können und uns an diesen ungewöhnliche Form des Wettbewerbes zu gewöhnen. Wir haben uns also alle am Freitag Nachmittag getroffen um uns auf die ersten Probe-Elfmeterschießen vorzubereiten. Nachdem wir unsere Software hochgeladen haben und die Berechnungen angefangen haben, haben wir gespannt darauf gewartet, dass das Video des Spieles gestreamt werden würde. Diese Berechnungen müssen schon vor dem Stream passieren, weil die Simulation sehr langsam ist und das keinen Spaß beim zuschauen machen würde. Also warteten wir…
Eine ganze Weile passierte nichts. Aber warum? Ein Fehler im automatisieren Schiedsrichter hat es allen Robotern verboten sich zu bewegen. Nachdem wir uns zwei sehr langweilige Spiele angeschaut haben, wurden die nachfolgenden Spiele auf unbestimmte Zeit verschoben bis das Problem gelöst werden konnte. Diese freie Zeit haben wir genutzt um noch einige Probleme in unserem eigenen Code zu lösen. Dabei haben wir noch einige weitere Probleme in dem Code des Schiedsrichters gefunden.
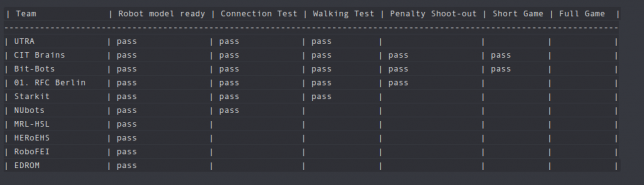
Am Samstag wurde dann die ursprüngliche Planung komplett geändert: Statt der geplanten regulären Spiele, wurde eine Reihe von Herausforderungen aufgestellt. Diese sollten die Teams zu einem Punkt hinführen an dem sie bereit für den Wettbewerb sind. Nachdem das Modell unseres Roboters begutachtet wurde und wir uns erfolgreich mit dem Server verbunden haben, war die erste Herausforderung einfach nur zu laufen. Damit konnte sicher gestellt werden, dass die Roboter sich bewegen dürfen und ein solches Problem wie am Freitag nicht nochmal auftreten würde. Danach waren die nächsten Challenges ein Elfmeterschießen, ein kurzes Spiel und abschließend ein ganzes Spiel. Unsere gesamte Software hat sehr gut funktioniert und wir kamen schnell durch die Challenges. Am Samstag gelang es uns das erste Tor der Mock Competition zu schießen.
Zugegeben, weil wir zuerst hingefallen sind, und damit den Ball näher zum Tor bewegt haben, war das etwas einfacher als erwartet. Trotzdem haben wir mit unserem dynamischen Kick elegant um den Torwart herum gespielt und uns den ersten Punkt des Wochenendes ergattert.
Am Sonntag hatten wir dann die Gelegenheit ein erstes kurzes normales Spiel zu spielen. Da haben wir gegen den 01. RFC Berlin gespielt. In der ersten Hälfte sah es gut für uns aus. Wir haben noch ein Tor geschossen und hätten fast noch ein zweites geschossen, aber als die Zeit ablief lag der Ball knapp vor der Torlinie.
Dann startete die zweite Hälfte und nichts mehr ging. Der Schiedsrichter hat die Roboter nicht richtig zurückgesetzt und es sind erst mal alle acht Roboter hingefallen, wofür sie dann eine Strafe vom Schiedsrichter bekamen. Trotz alle dem haben wir uns davon erholen können und uns aus dem Haufen von Robotern befreien können, der entstand, weil alle Roboter aufeinander positioniert wurden. Nachdem wir dann verstanden haben wo wir auf dem Feld stehen, sind unsere Roboter alle schnell los gelaufen um sich vor den Ball zu stürzen, der Ball lag nämlich noch da wo er am Ende der ersten Halbzeit lag. Das war jetzt aber wegen des Seitenwechsels eben unser eigenes Tor. Kurz nachdem wir den Ball dort retten konnten, ist aber der Schiedsrichter abgestürzt und das Spiel musste abgebrochen werden.
Trotz des Chaos und der Probleme die wir gefunden haben, sind wir überzeugt, dass die meisten Probleme die auftauchen können jetzt gefunden sind und der eigentliche Wettbewerb dank dieses frühen Tests ungestört laufen kann . Wir konnten beobachten, dass unsere Software läuft wie wir es erwarten und freuen uns auf die richtige Weltmeisterschaft die am 24.6 losgeht.