Das Schnupperstudium bietet Schülerinnen und Schülern in den Ferien eine Woche lang einen Blick in das Studentenleben. Dabei gibt es neben der Vorstellung verschiedener Forschungsfelder, Gespräche mit Berufstätigen und Studenten, sowie einer Probevorlesung auch Projektarbeit für die Schüler. Dabei bieten die Projekte einen praktischen Einstieg, bei dem sie jeden Tag der Schnupperstudiumswoche weiterarbeiten können. Wir als AG haben während dieser Woche, die vom 25.03.24 bis zum 28.03.24 ging, eine Projektgruppe begleitet, sowie unsere Roboter in Forschungsdemos den anderen Gruppen vorgestellt.
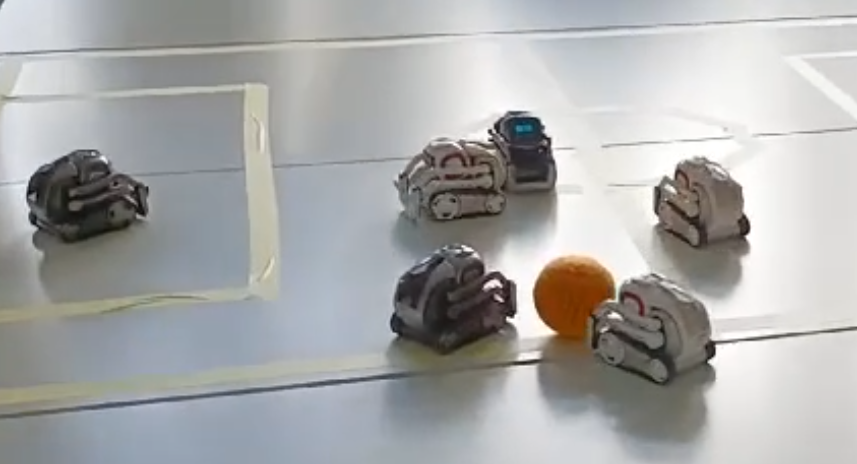

Zu Beginn der Woche haben wir uns in der Projektarbeit mit sogenannten Cozmos beschäftigt. Hierbei handelt es sich um kleine Roboter, die über eine App mit einer Scratch ähnlichen Sprache programmiert werden können. Gerne hantieren diese Roboter auch mit kleinen Würfeln, die mit zu ihrer Ausstattung gehören und von ihnen angehoben oder gerollt werden können. Die Schüler durften den Robotern durch immer anspruchsvollere Aufgaben das Fußball spielen „beibringen“. Am Anfang des dritten Tages war dann eine kleines Spiel mit drei gegen drei Robotern möglich.

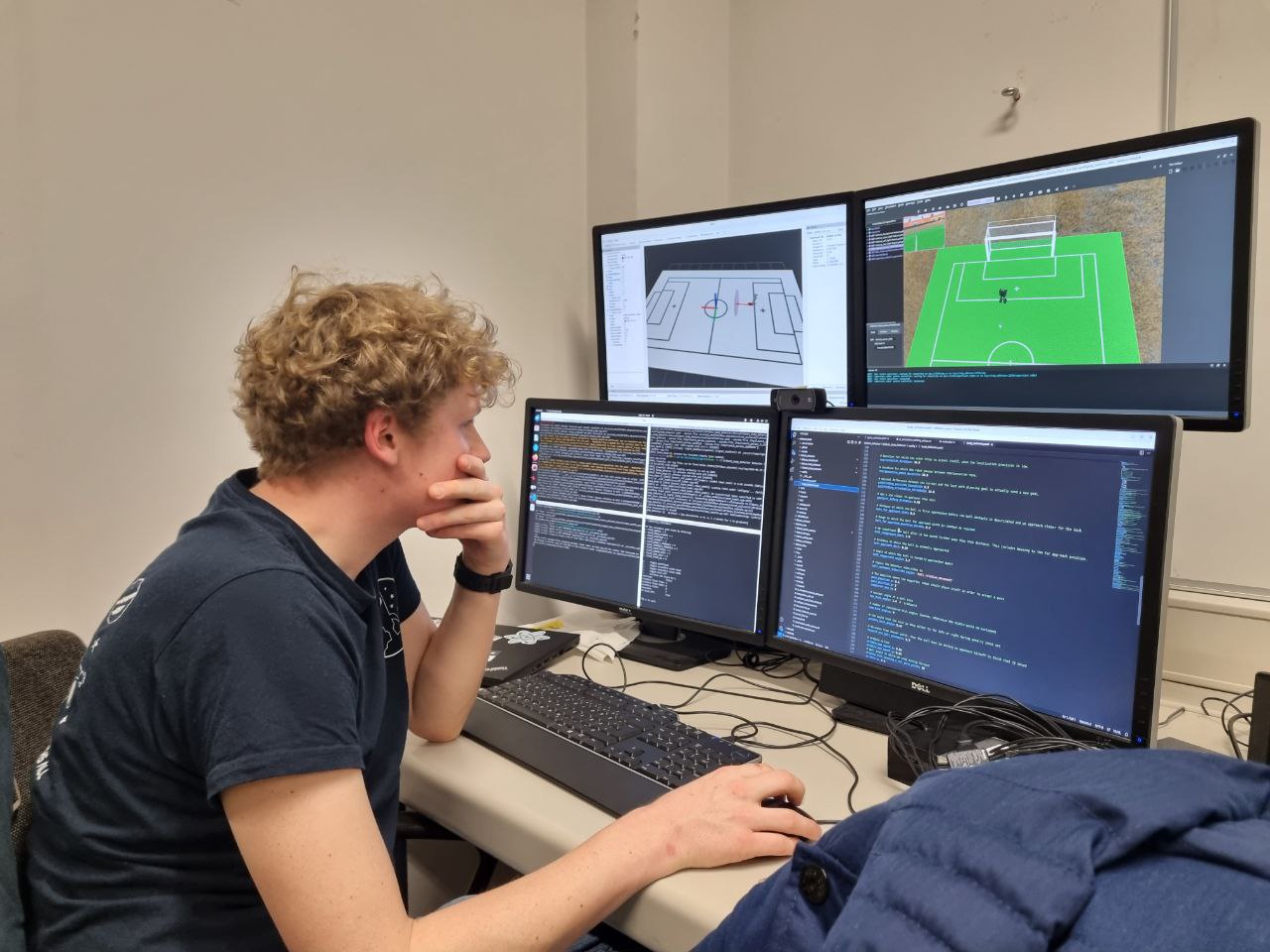
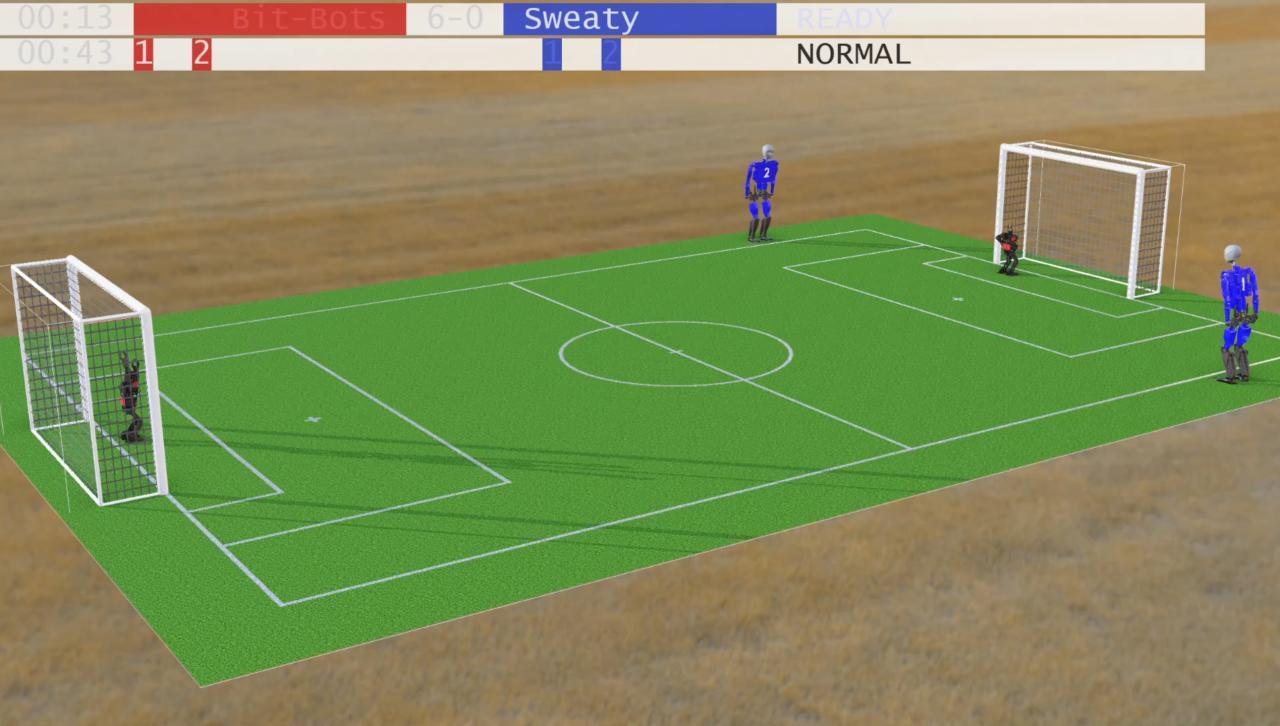
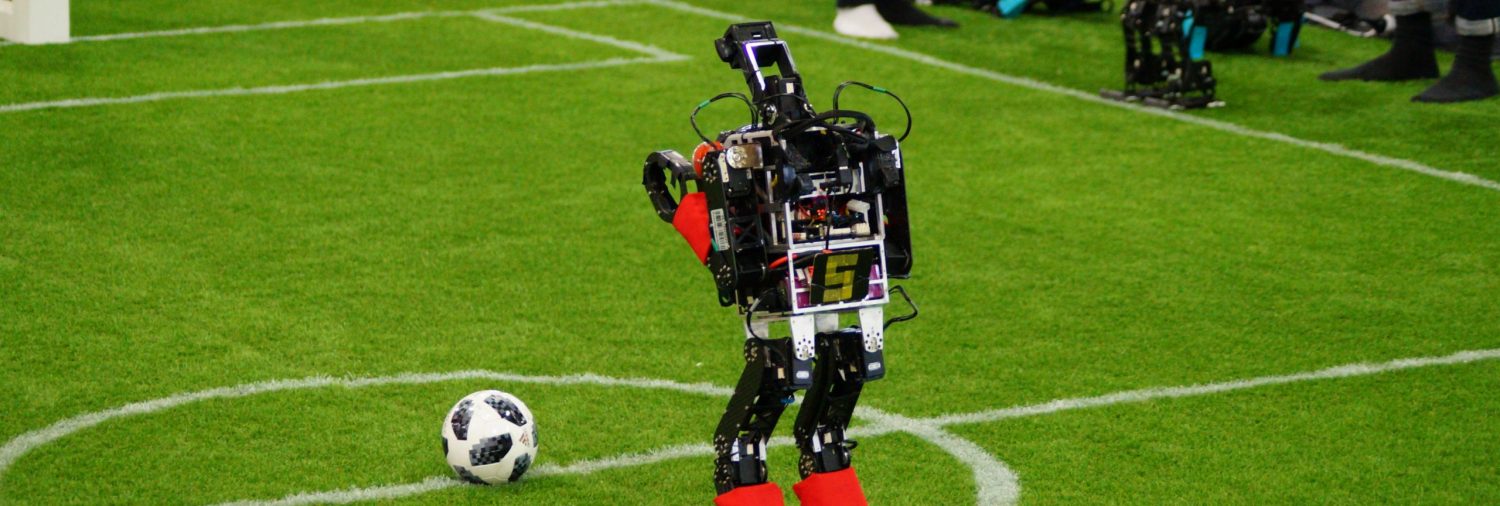
Zum Ende der Woche durften die Schüler in Simulation mit unseren großen Wettkampfrobotern arbeiten und schafften es auch dort zum Ball zu gelangen und damit Tore zu schießen. Zudem wurden Viedoaufnahmen für die abschließende Projektvorstellung hergestellt.
Die Woche hat sowohl den Schülern als auch den betreuenden Mitgliedern in unserer AG sehr viel Spaß gemacht. Die Schüler meldeten auch zurück, dass sie gern noch mehr Zeit gehabt hätten, um mehr in der Projektarbeit zu schaffen. Durch den Karfreitag war das Schnupperstudium um einen Tag verkürzt gewesen. Wir konnten auch einzelnen dabei helfen, herauszufinden, dass Informatik ihnen Spaß bringt und ein Teilnehmer wollte am liebsten gleich anfangen zu studieren. Wir werden auf jeden Fall nächstes Jahr wieder dabei sein.
Bis dahin steht dann diesen Monat auch die German Open an (GO), wo wir in Kassel gegen andere Teams antreten werden.