Für unsere Reise zum RoboCup haben wir uns dieses Jahr für ein Auto entschieden. Aufgrund der geringen Entfernung nach Südfrankreich war dies die praktischste Wahl, da wir so mehr Material mitnehmen konnten, zum Beispiel einen 3D-Drucker und Monitore.
Am Freitag haben wir den Neunsitzer abgeholt, alles gepackt und sind gegen Mittag losgefahren. Insgesamt dauerte die Fahrt etwa zwanzig Stunden, aber dank unserer fünf Fahrer war sie gut zu bewältigen. Zwischendrin haben wir hinter Paris noch einen kleinen Stopp in Versailles gemacht und wollten einen nächtlichen Blick auf das Schloss werfen. Allerdings fanden wohl gerade Restaurationsarbeiten statt und das Eingangstor war mit Holzplatten verdeckt.
Schließlich erreichten wir am Samstagmorgen gegen neun Uhr unser Ziel. Wir wohnen in einem kleinen Haus auf einem Campingplatz direkt neben dem Parc des Expositions, wo der RoboCup stattfindet. Das Haus konnten wir jedoch erst um 17 Uhr beziehen, daher verbrachten wir den Tag mit IKEA-Frühstück und Schwimmengehen. Abends konnten wir endlich ins Haus und begannen direkt damit, alles einzuräumen und einzurichten.
Am Sonntag widmeten wir uns den Vorbereitungen für den RoboCup: Roboter zusammenschrauben, Software testen, Fehler beheben und so weiter. Am Montag setzten wir die Vorbereitungen fort, hatten aber auch die ersten Kontakte zu anderen Teams: Die HULKs, ein anderes Team aus Hamburg, wohnen auch auf dem Campingplatz, die HERoEHs aus Korea haben wir im Waschsalon getroffen und heute Abend gehen wir mit den Wolves aus Wolfenbüttel essen.
Morgen können wir dann die Halle betreten. Dann werden die letzten Tests in der echten Spielumgebung durchgeführt und der Wettbewerb kann beginnen!
Im Verlauf der letzten Woche fand die GORE, das German Open Replacement Event statt. Aufgrund der aktuellen Lage war es in diesem Jahr erneut nicht möglich, eine richtige German Open durchzuführen. Stattdessen gab es mehrere kleine Events für die einzelnen Ligen. GORE, das Ersatzevent für die Humanoid- und Standard Platform League, fand dabei in Hamburg in der Handelskammer statt.
Für uns war dieses Event aus vielerlei Hinsicht interessant. Zuerst war dies das erste Turnier seit über 2 Jahren, das in Präsenz stattfinden konnte. Damit war die letzte Woche auch der erste Versuch in 2 Jahren, unsere Software unter Wettkampfbedingungen zu testen. Mit vielen Hardwareänderungen und unserem Umstieg auf ROS2 war es zunächst gar nicht so leicht, überhaupt irgendetwas zum Laufen zu bekommen. Da sich aber leider ohnehin nicht genügend Humanoid Teams angemeldet hatten, um ein richtigesTurnier durchzuführen, hatten wir mehr als genügend Zeit, unsere Probleme zu beheben. Nach den 3 Setup Tagen hatten wir also bereits das Laufen, Aufstehen, Schießen, sowie die Objekterkennung integriert. Das einzige Problem bestand nun darin, alle diese Komponenten auch gleichzeitig nutzen zu können. Denn mit dem Umstieg auf ROS2 ist das Senden und Empfangen von Nachrichten plötzlich wesentlich rechenintensiver geworden. Um überhaupt spielen zu können, haben wir entschieden, vorübergehend die Anzahl der versendeten Nachrichten zu verringern und werden in den nächsten Tagen nach einer Lösung für dieses Problem suchen.
GORE war für viele unserer neueren Teammitglieder auch die erste Möglichkeit, die Abläufe eines Wettkampfes kennenzulernen. Damit sind wir nun perfekt darauf vorbereitet, in Bangkok gemeinsam den Weltmeistertitel zu holen. Auch unsere Schiedsrichter konnten in der letzten Woche bereits etwas Übung sammeln, als wir spontan ein Spiel für die SPL pfeifen sollten. Da sich die Regeln zwischen den beiden Ligen in vielen Punkten stark unterscheiden (in der SPL gibt es beispielsweise keine gelben und roten Karten), war das gar nicht so einfach, aber ich glaube, wir haben uns ganz gut geschlagen.
Am Samstag war es dann Zeit, unser Können in einem Demonstrationsspiel gegen die NAO Devils zu beweisen. Dabei ging es in diesem Spiel nicht nur um den Wettstreit zwischen Humanoid League und SPL, sondern auch um den Wettstreit Mensch gegen Maschine. Denn: Unser Roboter wurde von einem Teammitglied ferngesteuert. Damit wollten wir zeigen, auf welchem Stand sich der Roboterfußball auf dem Weg zum autonomen Spiel momentan befindet. Das Ziel des RoboCup ist es nämlich, bis 2050 den menschlichen Fußballweltmeister zu besiegen. Da es bei der momentanen Robotergröße noch keinen Sinn ergeben würde, einen echten Menschen gegen sie spielen zu lassen, konnten wir uns auf diese Weise einen Vergleich erschaffen. Man könnte den 2:0 Sieg der NAO Devils jetzt darauf schieben, dass unsere Hardware schon zu Beginn des Spiels etwas lädiert war, oder darauf, dass die Devils in der Überzahl waren, Fakt bleibt jedoch: Die Roboter haben gegen den Menschen gewonnen. Und damit sind wir unserem Ziel schon verdammt nahe.
Neben dem Turnier der SPL (In dem Team B-Human in einem spannenden Finalspiel gegen HTWK Leipzig den ersten Platz erringen konnte) wurden auf der GORE am Sonntag auch die Finalspiele der Humanoid League Virtual Season ausgetragen. Nach zwei relativ ereignislosen Halbfinalspielen zogen wir ins Finale ein und mussten dort gegen die CIT Brains antreten. Etwas Respekt hatten wir schon vor diesem Spiel, denn in den letzten Wochen konnten wir bereits mehrfach beobachten, wie gut die Software der CIT Brains funktioniert und vielen Gegnern echte Probleme bereitet hat. Wir wussten aus unserer letzten Begegnung gegen das Team aber auch, dass wir dieses Spiel gewinnen konnten. In der ersten Halbzeit sah es auch sehr gut aus für uns, und wir konnten 2:1 in Führung gehen. In der zweiten Halbzeit konnten die CIT Brains drei weitere Treffer erzielen und so mit einem verdienten 4:2 den Sieg erringen. Wir gratulieren zu diesem verdienten Sieg und freuen uns sehr über unseren zweiten Platz!
Nicht zuletzt war diese Woche auch deswegen etwas besonderes für uns, da zwei unserer Teammitglieder maßgeblich an der Organisation dieses Events mitgewirkt haben. Dass trotz unserer begrenzten Erfahrung in der Eventplanung alles so reibungslos abgelaufen ist und wir Teams und Zuschauern einige aufregende Tage bescheren konnten freut uns sehr! An dieser Stelle wollen wir uns auch noch einmal herzlich bei Arne (NAO Devils) und Patrick (HULKs) bedanken, die gefühlt jeweils noch mal mindestens doppelt so viel Arbeit wie wir beide zusammen in die Orga gesteckt haben und ohne die ein solches Event nicht möglich gewesen wäre. Danke dafür!
Ab heute geht dann der reguläre Betrieb bei uns im Labor weiter. Wir konnten vieles aus der letzten Woche lernen und nutzen diese Erkenntnisse nun, um die letzten Vorbereitungen für die WM zu treffen.
Die Brazil Open ist ein RoboCup Turnier das online und in Simulation veranstaltet wurde. Die Spiele wurden mit fast der gleichen Simulationsumgebung gespielt, wie der auf der Weltmeisterschaft, in der wir den den dritten Platz erringen konnte. Um die Berechnungen zu vereinfachen, wurde hier aber entschieden, nur einen Roboter gegen einen Roboter antreten zu lassen.
Das Turnier wurde in einem Liga Format veranstaltet, so dass jedes Team gegen jedes andere Team spielen durfte. Wir hatten bereits alle außer einem Team schlagen können, gegen das wir nur ein Unentschieden erreichten. Das letzte Spiel war nun gegen den Weltmeister Starkit, die jedes Spiel des Turniers bisher gewonnen hatten. Wir sind also in dieses finale Spiel gegangen, mit der Hoffnung zu gewinnen, aber mit der Erwartung es zu verlieren.
Wenn ihr euch das Spiel ansehen wollt, mit Kommentierung von uns und von Starkit, hier ist es verfügbar:
Vor wenigen Minuten haben wir offiziell das Spiel um den dritten Platz gegen die CIT Brains gewonnen. Es war ein unfassbar knappes Spiel und hat sogar so viele Probleme verursacht, dass die Simulation mehrfach neu gestartet werden musste. Somit musste das Spiel um 5 Stunden verschoben werden und wir waren noch viel aufgeregter und nervöser als es endlich los ging.
Als das Spiel dann endlich startete, wurden wir darauf hingewiesen, dass es einige Probleme gab, die uns im Verlauf des Streams erklärt werden sollten. Noch hatten wir also keine Idee von dem Chaos, dass uns in den nächsten Minuten erwarten würde.
In der ersten Spielhälfte erzielten wir zwar ein Tor, spielten aber etwas zu aggressiv, sodass einer unserer Spieler eine gelbe Karte und ein weiterer eine Verwarnung erhielt. Plötzlich mussten wir uns darum Sorgen machen, dass wir einen unserer Angreifer verlieren… Dann erfuhren wir aber, dass aufgrund eines Fehlers die Simulation nach der ersten Hälfte neu gestartet werden musste, sodass wir unsere Karten wieder verloren. Als Ausgleich dafür bekamen die CIT Brains erneut den Anstoß.
Wir hatten gehofft, dass wir dank der Simulation dieses Jahr keine Hardwareprobleme haben würden. Trotzdem haben wir es irgendwie geschafft, dass eben solche Probleme auftreten. Und das natürlich genau in diesem entscheidenden Spiel! Die Beine eines unserer Roboter verhakten sich in einander, sodass es nicht mehr möglich war, aufzustehen. Glücklicherweise wurden wir wenige Sekunden später zurückgesetzt, da wir auf der falschen Hälfte lagen und uns nicht mehr bewegen konnten. Eine ernsthafte Katastrophe konnten wir also so gerade noch verhindern.
In vielerlei Hinsicht fühlte sich dieses Spiel beim Zuschauen wie ein echtes Fußballspiel an. Besonders deutlich konnte man das daran erkennen, wie häufig wir den Schiedsrichter angeschrien haben. Während des Spiels traf der automatische Schiedsrichter einige fragwürdige Entscheidungen, wie zum Beispiel, dass der Ball während eines Elfmeters nur wenige Zentimeter vor unserer Torlinie platziert wurde. Als unser Torwart sich dann wie erwartet auf der Torlinie platzierte, um den Ball abzufangen, wurde er stattdessen entfernt, da er sich nun laut den Regeln zu dicht am Ball befand. Somit konnten die CIT Brains leicht ein Tor erzielen. Wenig später erzielten sie durch eine ähnliche Entscheidung ein zweites Tor.
Das Glück der CIT Brains hielt aber nicht lange an. Kurz vor Ende der zweiten Halbzeit gelang es uns, auf die gleiche Art einen Strafstoß zu erhalten, den Torwart zu entfernen und ein Tor zu erzielen. Es stand also 2 : 2.
Da nicht mehr genügend Zeit verbleibend war, um die Nachspielzeit zu simulieren, haben die Veranstalter beschlossen, diese zu überspringen und stattdessen direkt zum Elfmeterschießen überzugehen. Das hat uns sehr nervös gemacht, da wir aus unseren Testspielen wussten, dass wir das Tor zwar treffen konnten, aber in den meisten Fällen die Distanz zum Tor nur knapp, beziehungsweise häufig eben knapp nicht, bewältigen konnten. Die CIT Brains gaben aber bekannt, dass sie selber ihr Verhalten im Elfmeterschießen bisher nicht getestet haben. Das gab uns etwas Hoffnung.
Während dem ersten Schuss lief der Roboter der CIT Brains zu früh los, dribbelte den Ball bis vor das Tor und wurde dort vom Auto-Referee gestoppt. Unser erster Kick hingegen wurde korrekt ausgeführt, erreichte das Tor allerdings nicht. Wir hatten also schon einen Vorteil, da im Falle eines Unentschiedens nun die zurückgelegte Balldistanz gewertet werden würde.
Für die nächsten Schüsse stoppte das Verhalten der CIT Brains vollständig, sodass sie nichts unternahmen, während wir erneut das Tor knapp verfehlten. Unser vierte Schuss brachte uns schließlich den rettenden Punkt. Da im Rest des Elfmeterschießens keine weiteren Tore fielen, gewannen wir das Spiel mit einem 3 zu 2 und erreichten somit den dritten Platz.
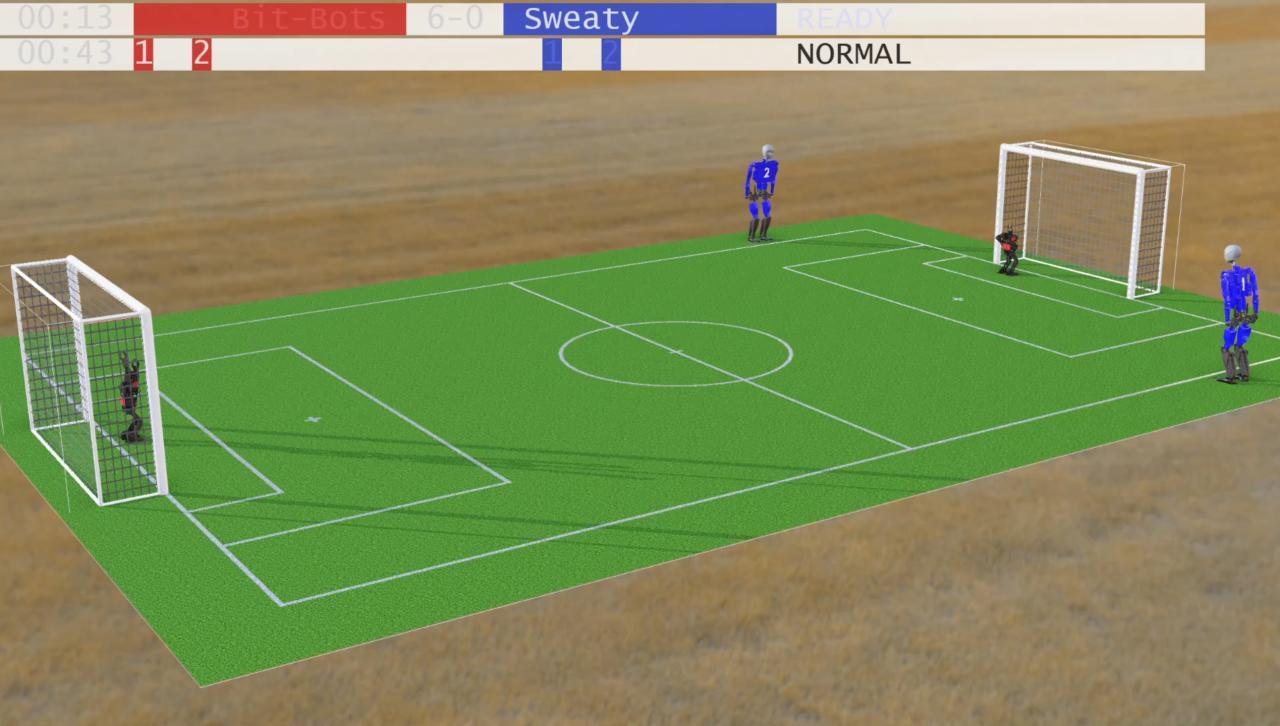
Heute hatten wir die Möglichkeit gegen das Adult Size Team Sweaty zu spielen. Sie sind momentan die Favoriten, das Finale der Weltmeisterschaft in ihrer Liga zu gewinnen. Da es für uns leicht war, unsere Software so zu ändern, dass wir auch auf einem größeren Feld mit einem größeren Ball spielen können, haben wir angeboten auf dem regulären Feld der Adult Size zu spielen. Wir konnten nur zwei Roboter nutzen, statt unserer üblichen drei oder vier, da das notwendig war um auf dem großen Feld zu spielen.
Wir bekamen Angst, als wir die Größenunterschiede zwischen den Robotern sahen, aber wir waren schon früh die Favoriten, als wir uns ins Feld bewegten und uns richtig positionierten. Die Roboter von Sweaty bewegten sich leider nicht ins Feld. Die Vermutung von Sweaty ist, dass es Probleme mit der Verbindung zum Schiedsrichter gab und die Roboter deshalb nicht wussten, dass sie anfangen dürfen zu spielen.
Am Ende haben wir es geschafft, insgesamt sechs Tore auf dem großen Feld zu schießen.
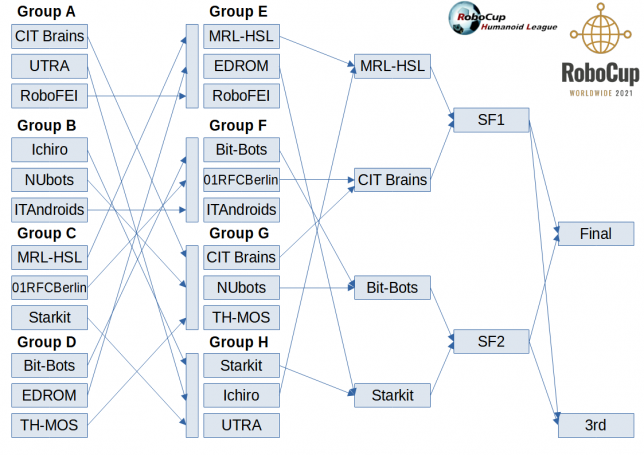
Im Halbfinale durften wir gegen Starkit antreten. Starkit hatte in ihren letzten Spielen eine beeindruckende Leistung gezeigt und wir freuten uns sehr darauf, dass wir gegen sie spielen durften. Wir haben letzte Nacht noch ein paar letzte Bugs gefixt, aber keine großen Änderungen vorgenommen. Da wir unsere Strategie nicht in der Mitte eines Spieles ändern können, musste sie einfach zuverlässig funktionieren.
Wir mussten unseren Code um 12:30 hochgeladen haben und unser Spiel startete um 20:30. Das gab uns eine Menge Zeit nur da zu sitzen und gespannt auf unser Spiel zu warten.
In unserem Spiel heute morgen hatten wir Probleme, weil es länger lief als wir es erwartet hatten und die von uns gespeicherten Dateien deswegen zu groß waren. Damit uns das nicht wieder passieren konnten, haben wir die Anzahl der Bilder die wir aufgenommen haben halbiert. Das sollte nichts kaputt machen können… Richtig? RICHTIG? Nun ja… Das hat es aber getan. Zum Glück haben wir noch ein Test Spiel laufen lassen und es festgestellt. Das hätte unsere Roboter davon abhalten können sich zu bewegen und den Sieg an Starkit geschenkt.
Nach dem Erlebnis waren wir noch gespannter auf das Spiel und wenn ihr in der Nähe von uns wart, dann habt ihr uns wahrscheinlich jubeln gehört, als wir anfingen uns zu bewegen.
Zu Beginn des Spiels passten die Starkit Roboter zueinander und spielten uns aus. Anfänglich konnten wir uns noch gut verteidigen, aber gegen ihre beeindruckenden offensiven Spielzüge, konnten wir nicht mithalten.
Unser Torwart hat ein paar fragwürdige Entscheidungen getroffen. Er war nahe am Ball, aber entschied sich dann doch nicht den Ball von unserem Tor weg zu treten, sondern lief zurück zu seinem Tor um von dort aus die Sicherheit unseres Tores sicher zu stellen.
In einer späteren Situation, lief unser Torwart dann in die Gegnerhälfte um den Ball weiter weg zu treten. Damit kam er an allen Gegnern vorbei, aber entschied sich dann, dass der Ball jetzt sicher ist und rannte wieder zu unserem Tor zurück. Das gab den Robotern von Starkit dann wiederum die Möglichkeit zur Offensive.
Die Starkit Roboter schafften es am Ende sieben Tore gegen uns zu erzielen. Unsere Roboter ließen sich aber nicht demotivieren und versuchten weiterhin ihr bestes. Damit schafften sie es zwei Tore für uns zu erringen.
Wir sind wirklich stolz darauf, was unsere Roboter geschafft haben. Wir freuen uns auch darauf morgen im Spiel um den dritten Platz gegen die CIT-Brains zu spielen. Wenn ihr es anschauen möchtet, es wird morgen um 10 hier gezeigt werden: https://www.twitch.tv/robocuphumanoidfielda
Nach dem spannenden Spiel gestern gegen den 01. RFC Berlin, durften wir heute im Viertelfinale spielen. Die Australischen Nubots haben das Los gegen uns gezogen. In der Gruppenphase hatten sie es geschafft ein Tor zu erzielen, aber wir waren uns relativ sicher, dass wir das Spiel gewinnen könnten. Wir waren aber immer noch vorsichtig, denn ein Fehler in unserer Software hätte uns vom Spielen abhalten können und uns den Sieg gegen die Nubots kosten können.
Als das Spiel los ging waren wir sehr froh, als unsere Roboter anfingen los zu laufen, weil wir uns dann sicher waren, dass wir normal spielen würden. Die Nubots wehrten sich am Anfang, aber trotzdem gelang es uns ein Tor zu schießen.
Der Schiedsrichter hat das aber nicht als Tor für uns gewertet. Stattdessen vergab er einen Abstoß an die Nubots. Wir bekamen ein wenig Panik, da der Schiedsrichter dort offensichtlich einen Fehler gemacht hatte und das Spiel jetzt immer noch ausgeglichen war.
Unsere Roboter waren aber weiterhin voll motiviert und warteten einfach ab bis wir den Ball spielen durften und schossen gleich noch ein Tor. Dieses mal hat der Schiedsrichter das Tor auch gezählt und wir gingen in Führung mit einem 1-0.
Die Nubots wehrten sich ab diesem Zeitpunkt nicht mehr wirklich und es gelang uns ein Tor nach dem anderen zu schießen. Nach der ersten Hälfte führten wir schon 7-0. In der zweiten Hälfte waren wir aufgeregt, denn wir waren auf einem guten Weg das beeindruckende 15-0 zu schlagen, dass MRL in einem vorherigen Gruppenspiel erreicht hatte.
Die zweite Hälfte lief ab und wir schafften es ihr Ergebnis um genau ein Tor zu übertreffen. Das offizielle Ergebnis war 16-0. Hätte das erste Tor gezählt, dann hätten wir wahrscheinlich 17-0 gewonnen.
Nach dem Spielende haben wir herausgefunden, dass wir mehr Zeit zur Verfügung hatten, weil nach einem Tor in den KO Spielen mehr Zeit gegeben wird, um die Zeit auszugleichen, in der die Roboter nach einem Tor den Ball nicht spielen dürfen.
Jetzt freuen wir uns darauf, heute Abend um 20:30 gegen Starkit im Halbfinale spielen zu dürfen.
Wir haben gerade unser letztes Gruppenspiel gewonnen. Wir sind immer noch atemlos, weil unsere Herzen das ganze Spiel über gerast sind. Wir wussten schon, dass dies ein aufregendes Spiel werden würde, weil der 01. RFC Berlin die IT Androids mit dem selben Ergebnis wie wir besiegt hat: 9-0. Allerdings war das Spiel gegen die IT Androids nicht so spannend wie das gegen Berlin.
Unsere Aufregung stieg noch mehr, als wir herausfanden, dass die Übertragung unseres Spieles auf später verschoben werden musste. Das war das erste Spiel dieses Turniers in dem das notwendig war. Wir haben spekuliert, dass es daran lag, dass die Simulation komplexer war, weil sich unsere und die Berliner Roboter öfters kollidierten als die Roboter in den Spielen vorher. Wir wussten also schon, dass wir uns auf ein spannendes Spiel freuen konnten.
Bereits zu Beginn des Spiels gelang es den Berliner Robotern tief in unsere Hälfte zu spielen und dabei ging er sogar in unseren Strafraum. Unsere Roboter schafften es allerdings den folgenden Zweikampf für sich zu gewinnen und die Berliner Roboter mussten mit einer Zeitstrafe das Spielfeld verlassen. Diese Zeit konnten wir ausnutzen und den Ball zur Mitte des Spielfeldes zurück spielen. Trotz alledem, war das nicht genug um den Ball in Sicherheit zu bringen, denn die Berliner Roboter drückten den Ball wieder vorwärts in unsere Hälfte. Sie haben sogar versucht ein Tor zu schießen, aber unser heldenhafter Torwart stand richtig und konnte den Ball davon abhalten, ins Netz zu fliegen. Damit war der Angriff der Berliner aber noch nicht beendet. Sie bekamen vom Schiedsrichter sogar einen Elfmeter zugesprochen.
Sie kickten den Ball und er wäre ins Tor gerollt, aber der Schiedsrichter pfiff seine (imaginäre) Pfeife, denn sie hatten den Ball schon getreten, bevor der Schiedsrichter den Ball freigegeben hatte. Das konnte uns zum Glück gerade noch retten. Die Angreifer mussten nun das Feld für 30 Sekunden verlassen und unsere Roboter nutzten die Gelegenheit und stürmten nach vorne. Jedoch hatten wir leider nicht mehr Glück als die Berliner Roboter und die gute Verteidigung der Berliner konnte alle Torversuche von uns verhindern.
Nachdem wir gespannt zuschauten, wie beide Teams versuchten das Spiel aus dem Mittelfeld aufzubauen, haben wir einen Glückstreffer gelandet. Zwei der Berliner Roboter wurden vom Schiedsrichter an den Rand des Feldes geschickt und unser Stürmer konnte geschickt den einzigen übrig gebliebenen Verteidiger ausspielen. Dann waren wir unaufhaltsam und konnten endlich unser erstes Tor schießen.
Der Roboter in der Mitte freute sich so sehr, dass er für unseren Stürmer jubelte.
Die Berliner Roboter haben aber noch nicht aufgeben wollen. Sie haben weiterhin gut gestürmt und hatten sehr gute Chancen vorne. Der Schiedsrichter hat uns aber wieder gerettet, indem er ihren Robotern eine Zeitstrafe gab, weil sie zu schnell in einer Standardsituation den Ball kickten, oder uns versuchten umzuwerfen.
Wir konnten unsere 1-0 Führung in die zweite Hälfte retten und nach einer Weile wirkte es als hätten wir die Moral von einem der Berliner Roboter gebrochen. Nachdem der Roboter eine Strafe bekam, hörte er einfach auf sich zu bewegen und das mitten in einem Schritt. Die Teammitglieder des 01. RFC Berlin haben uns erzählt dies läge an einem Fehler in ihrem Code und der Roboter wäre abgestürzt. Unsere Roboter nutzten die Möglichkeit und gewannen die Zweikämpfe im Strafraum der Berliner und erzielten unser zweites Tor.
Mit unserer 2-0 Führung beruhigten sich unsere Herzen wieder ein wenig und wir freuten uns über den Vorsprung. Das Problem war nun aber, dass der Roboter, der sich vorher aufgehört hatte zu bewegen, sich jetzt wieder bewegte. Mit ihm gelang es dem 01. RFC Berlin fast ein Tor zu schießen und nur Zentimeter konnten uns retten.
Wir spielten weiter vorwärts und konnten noch ein paar gute der Schüsse der Berliner aus unserem Tor halten. Am Ende konnten wir das Spiel mit 4-0 für uns entscheiden.
Dann waren nicht nur unsere Roboter, sondern auch unsere Menschen erschöpft, aber feierten unser großartiges Spiel. Wir danken dem 01. RFC Berlin für dieses ereignisreiche Spiel und wir hoffen euch im Finale wieder zu sehen. (Hoffentlich auch mit dem gleichen Ergebnis ;))
Wir hatten eben unser erstes offizielles Spiel in dem wir gegen THMOS spielen durften. Wir waren überzeugt, dass wir das Spiel gewinnen können, aber es gibt immer Überraschungen die uns doch stoppen können. Zum Beispiel hatten wir in den letzten Tagen ein Problem wo wir ein einzelnes „,“ zu viel in unserem Code hatten, das unseren Roboter abstürzen lassen hat. Da es keine Möglichkeit gibt, während des Spiels noch irgendwelche Probleme zu lösen, können immer noch Überraschungen passieren.
Wir hatten allerdings Glück und unsere Software hat sehr gut funktioniert. Unsere Gegner hatten leider nicht so viel Glück. Sie hatten ein Problem mit ihrer Software und sind immer wieder von der Karte gerutscht.
Somit konnten wir einen überzeugenden 12:0 Sieg erringen und freuen uns auf unsere nächsten Spiele.
Wir freuen uns sehr, dass der RoboCup 2021 nun beginnt und wir bereits morgen die ersten Spiele unserer Liga sehen werden. Auch heute können wir aber bereits unsere und die Roboter der anderen Teams in den Testspielen anfeuern. Diese Spiele werden das Ende der zwei Aufbau Tage sein in denen wir die Chance hatten unsere Software nochmal ausführlich zu testen und die meisten Bugs zu entfernen die wir gefunden haben.
Unser erstes Testspiel gegen MRL-HSL wird heute um 17:40 auf dem ersten Twitch Kanal der oben verlinkt ist gezeigt. Wir würden uns freuen es gemeinsam mit euch anzuschauen!