Manchmal passiert etwas unerwartetes und plötzlich findet man sich auf der anderen Seite der Welt wieder. So etwas in der Art erfuhren neulich vier mutige Bit-Bots: Letzte Woche wurden Jasper und Sebastian (menschlich), ebenso wie Rory und Jack (menschenähnlich) darüber informiert, dass sie wenige Tage später nach Beijing fliegen sollten, um dort eine Präsentation auf der ersten Running Robot Competition zu halten…
Als wir diese Nachricht erhielten, waren wir sehr aufgeregt, aber auch sehr gestresst. Denn es war noch so viel zu erledigen und nur so wenig Zeit. Und so wurden alle Räder in Bewegung gesetzt, sodass wir bis Mittwoch Abend unsere Visas erhielten, um Donnerstag morgen den Flug anzutreten. Der Flug verlief ruhig und nur 19 Stunden später betraten wir die Messehalle, um uns umzusehen. Unsere Präsentation sollte am Samstag stattfinden, also hatten wir noch mehr als genug Zeit, um uns vorzubereiten. Es konnte also nichts schiefgehen, richtig? Falsch! Es stellte sich heraus, dass es durchaus chaotisch wird, wenn man innerhalb von wenigen Stunden versucht, alle wichtigen Dinge zusammenzupacken. Und so standen wir in Beijing, mit zwei leeren Akkus und ohne Ladekabel. Dafür hatten wir ein LAN_Kabel eingepackt, das viel zu kurz war. Aber irgendwie haben wir uns arrangiert und trotzdem eine gute Präsentation abgeliefert. Tatsächlich schienen wir so gut angekommen zu sein, dass das chinesische Fernsehen uns interviewen wollte
(link).
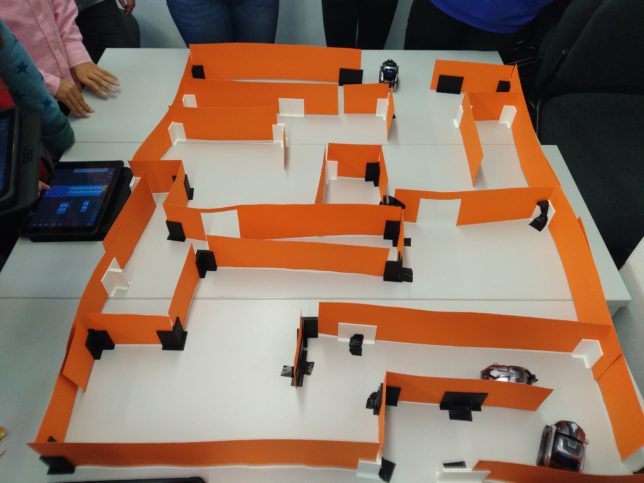
Aber wir haben diese Reise nicht nur unternommen, um eine kurze Präsentation zu halten. Wir wollten die Chance auch nutzen, um die anderen Redner zu hören, und natürlich auch, um den Wettbewerb zu sehen. Auch, wenn sich viele der Präsentationen leider nur als Keyframe-Animationen herausstellten, die uns nicht wirklich weiterbringen, habe wir trotzdem viele neue Leute kennengelernt und einige bekannte Gesichter entdeckt. Der Wettbewerb bestand aus mehreren Parkourelementen, die der Roboter absolvieren musste. Innerhalb von 8 Minuten mussten 8 Aufgaben gelöst werden. Die meisten dieser Aufgaben konnten mit einfachen Farberkennungs-Algorithmen gut gelöst werden, aber für ein erstes Jahr war der Wettbewerb doch herausfordernd. Wir hoffen, dass die Regeln in den nächsten Jahren etwas angezogen werden, um die Teams dazu zu bewegen, neue Lösungen zu entwickeln. Vielleicht wäre es sinnvoll, einige Farben aus dem Parkour zu entfernen, um die Teams dazu zu bewegen, künstliche Intelligenz zu nutzen.
Schließlich haben wir auch etwas Zeit gefunden, um uns in Beijing umzusehen. Gemeinsam mit unseren großartigen Guides haben wir die verbotene Stadt gesehen, waren am Olympiapark und am Tian’anmen Square. Wir haben auch den Campus der Tsinghua Universität besucht und uns die Labore unserer Guides angesehen.
Und plötzlich, nur drei Tage später war es auch schon Zeit zu gehen. Es waren drei anstrengende, aber auch interessante Tage. Und vielleicht kommen wir ja noch ein mal zurück.