Der RoboCup begann für uns mit erfolgreichen Vorbereitungstagen am Dienstag und Mittwoch. Schon in der ersten Stunde nach Betreten der Veranstaltungshalle stand unser erster Roboter auf dem Feld und hat sich an seine ersten Schritte erfolgreich durchgeführt. Da im letzten Jahr viel Aufwand der AG, insbesondere durch unseren Doktoranden Marc, darin geflossen ist, das Laufen zu verbessern und robuster zu machen, mussten wir nahezu keine Anpassungen machen, um das Feld mit Höchstgeschwindigkeit von 25cm/s zu überqueren. Gleichzeitig gingen die Vorbereitungen im Rest der Software weiter. Das Aufstehen, das in neuer Umgebung meist nicht gut funktioniert, weil es auf die Roboter und das Gras auf dem Feld angepasst werden muss, haben wir konfiguriert und stabilisiert. Außerdem haben wir eine neue Komponente für unser Verhalten entwickelt: Da wir zurzeit den Ball nicht zuverlässig schießen können, haben wir uns entschieden, stattdessen nur zu dribbeln. Das musste dann natürlich erstmal fleißig geübt werden. Außerdem haben wir unsere Lokalisierung getestet. Die Lokalisierung ist der Teil der Robotersoftware, der mithilfe der von unserer Bilderkennung erkannten Linien feststellt, wo auf dem Spielfeld er sich befindet. Da das noch nicht zuverlässig funktioniert hat, haben wir uns zunächst dafür entschieden, die Lokalisierung nicht zu nutzen und den Ball einfach in Richtung Tor zu dribbeln.
Am Donnerstag gingen dann morgens um neun die Spiele los. Wie üblich beginnt der RoboCup mit den sogenannten Drop-In-Spielen. Bei diesen Spielen treten fünf Roboter gegen fünf Roboter an, die Besonderheit dabei ist, dass alle Roboter von verschiedenen Teams stammen. Das Ziel ist also, dass die Roboter versuchen, beim Spielen mit fremden Robotern zu kooperieren. Das funktioniert im Allgemeinen allerdings nicht besonders gut und hat auch am Donnerstag zu viel Chaos geführt.
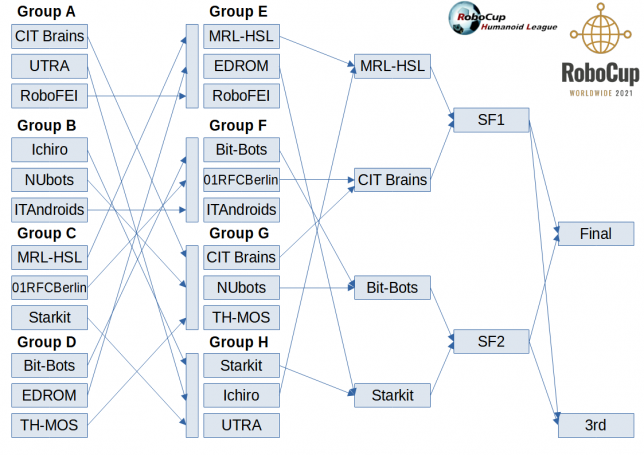
Etwas strukturierter ging es dann nachmittags bei den ersten Spielen der Gruppenphase zu. Bei diesem RoboCup gibt es die Besonderheit, dass es nicht nur eine, sondern zwei Gruppenphasen gibt, wobei die Ergebnisse der ersten Gruppenphase die Verteilung der Gruppen für die zweite Phase bestimmen. In unseren ersten Spielen hatten wir bereits alle vier Roboter einsatzbereit und konnten sie gleichzeitig auf dem Spielfeld laufen sehen. Schon das ist eine Besonderheit im RoboCup, wo die Roboter, die häufig fallen und Teile verlieren, ständig repariert werden müssen. Auch wenn wir es noch nicht geschafft haben ein Tor zu erzielen, konnten wir einige Male unser eigenes Tor verteidigen und die Gegner von Torschüssen abhalten. Abends sind wir dann noch in einem kurzen Freundschaftsspiel gegen den vielfachen Weltmeister und diesjährigen RoboCup-Ausrichter „Rhoban” aus Bordeaux angetreten. Das Spiel wurde auch vom Fernsehsender Arte gefilmt und für Fernsehmaterial vom RoboCup verwendet.
Am Freitag fand nach dem Ende der ersten Gruppenphase ein Entscheidungsspiel zwischen uns und dem anderen deutschen RoboCup-Team aus Wolfenbüttel statt. Das Spiel war sehr nervenaufreibend, da unsere beiden Teams bereits lange zusammenarbeiten und sich gut kennen und natürlich keins der beiden Teams gegen das andere verlieren wollte. Das Spiel wurde schließlich erst im Elfmeterschießen entschieden, wo wir mit dem Endergebnis 5-3 den Sieg erzielten.
Viel Ruhe wurde uns und den Robotern allerdings nicht gegönnt, da bereits zwanzig Minuten später das nächste Spiel gegen das chinesische Team TH-MOS anstand. Direkt darauf fand dann noch ein Spiel gegen die NUBots aus Newcastle, Australien statt, das unsere zweite Gruppenphase beendete. Beide Spiele gingen 0–0 aus und wir haben mit Spannung das Spiel zwischen unseren beiden Gegnern beobachtet, um festzustellen, ob wir ins Viertelfinale weiterkommen. Die NUBots haben das Spiel dann verloren, was bedeutet, dass wir und TH-MOS noch weiterspielen dürfen. Unser nächstes Spiel wird dann am Samstag im Viertelfinale gegen die CIT-Brains stattfinden. Das japanische Team ist der amtierende Weltmeister – wir gehen also nicht davon aus, dass wir gegen sie gewinnen werden. Natürlich hält uns das aber nicht davon ab, unser bestes zu geben und noch weitere Verbesserungen in unserer Software zu treffen.
Abgesehen von den Spielen besteht der RoboCup auch aus anderen Aspekten, insbesondere dem Austausch mit anderen Teams. Dabei nutzen wir die Gelegenheit gerne, die Teams aus aller Welt in direkter Nähe zu haben und tauschen uns über Probleme und ihre Lösungen aus, schauen die Roboter der anderen an und fantasieren über Verbesserungen an unseren oder analysieren vom Spielfeldrand gemeinsam die Spiele der anderen Teams. Das ganze wurde am am Donnerstag Abend sogar noch durch bereitgestelltes Buffet, Käse, Wein und französische Quarkbällchen unterstützt. Wir freuen uns auf weitere Gelegenheiten zum Austausch mit anderen Teams in den nächsten Tagen und auch beim Symposium, der wissenschaftlichen Konferenz zum RoboCup, die am Montag stattfinden wird.